Latent Action Pretraining From Videos
1. 论文速览
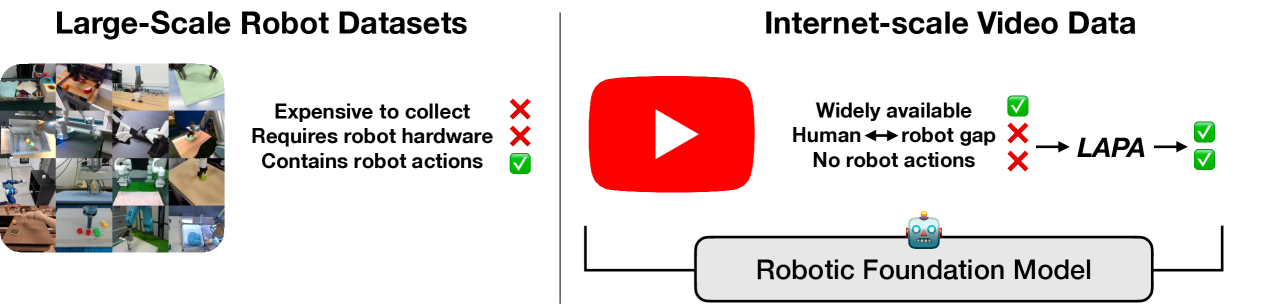
| 论文要解决什么 | 现有 VLA 预训练通常依赖机器人动作标签,这些标签需要真人遥操作采集,规模化困难。互联网视频和人类操作视频规模巨大,但没有机器人 action labels,且和机器人 embodiment / environment 分布不同。论文要解决的是:如何不用 ground-truth robot action labels,也能从视频中学习对机器人策略有用的动作先验。 |
|---|---|
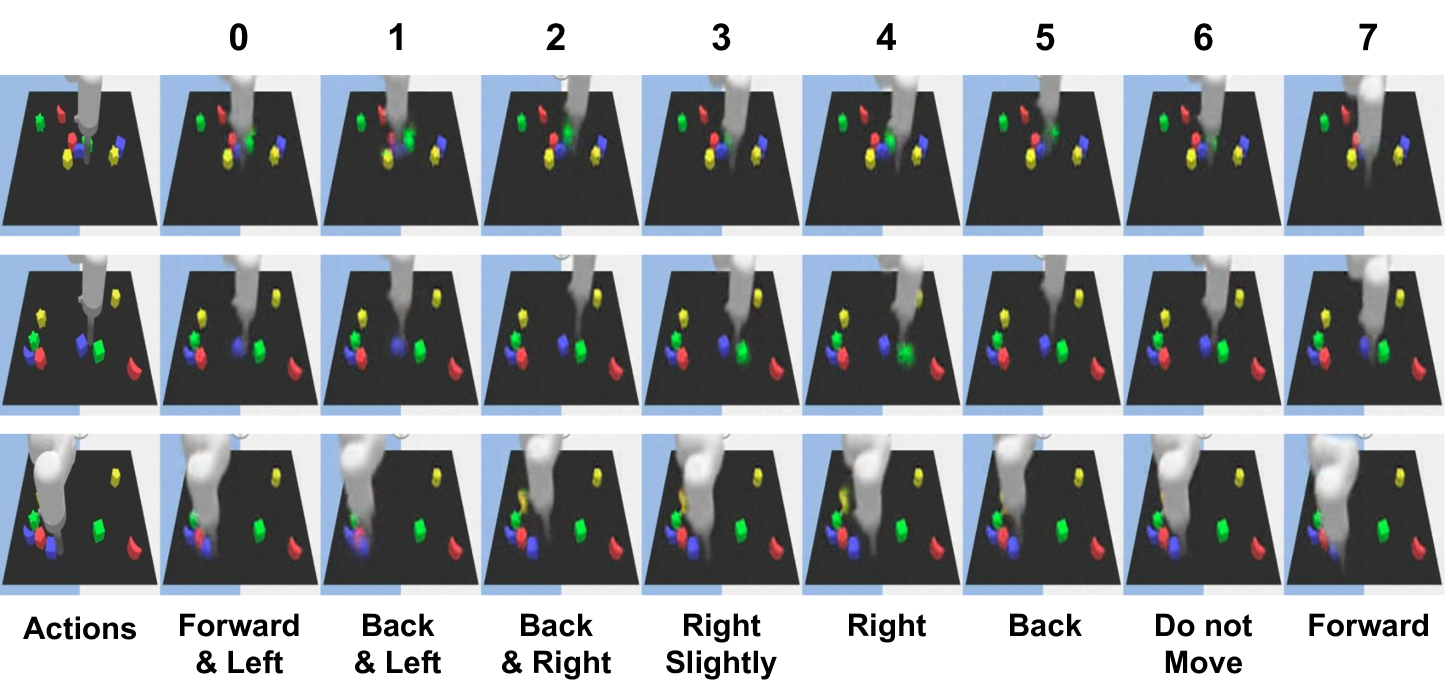
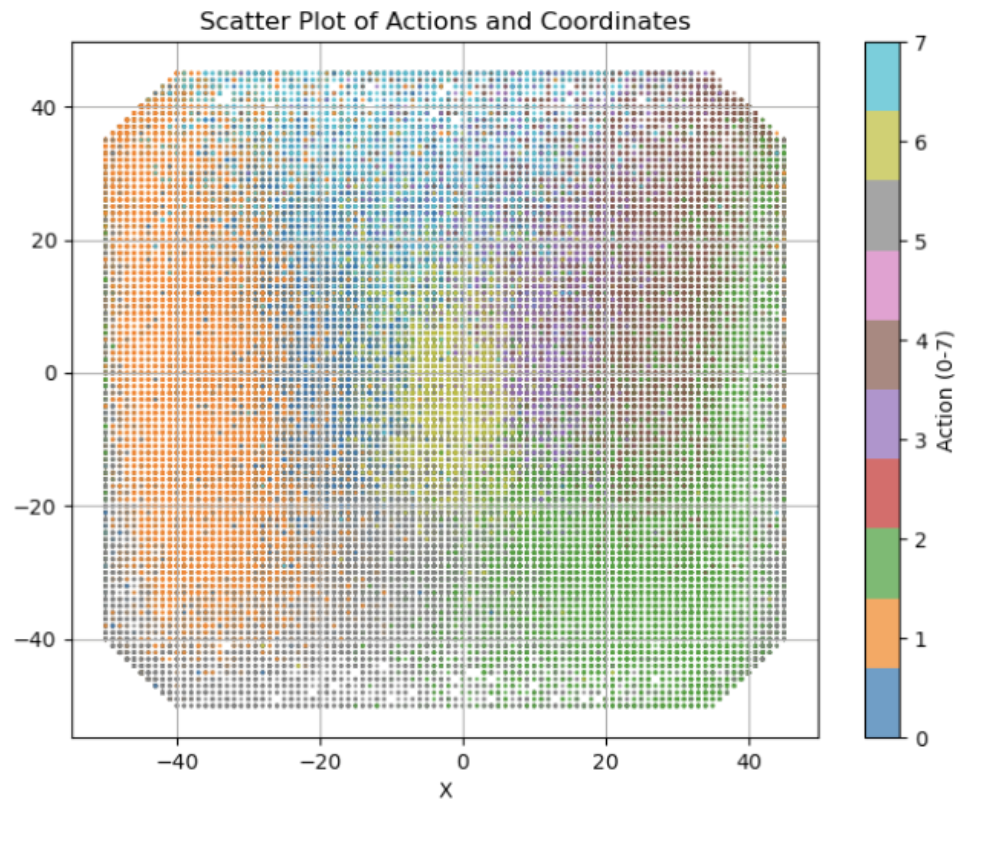
| 作者的方法抓手 | 抓手是把动作“tokenize”。第一阶段训练 VQ-VAE 风格的 latent action quantization model,从当前帧 \(x_t\) 和未来帧 \(x_{t+H}\) 学离散 latent action \(z_t\)。第二阶段用这些 \(z_t\) 作为伪标签,让 VLM 依据当前观察和语言指令预测 latent action。第三阶段只用小规模 action-labeled robot trajectories 做 action finetuning,把 latent action 迁移到真实 7-DoF end-effector delta action。 |
| 最重要的结果 | 在真实桌面操作中,LAPA(Open-X) 总成功率 50.09%,高于 OpenVLA(Open-X) 的 43.87%,论文总结为相对 OpenVLA 提升 +6.22%;同时 LAPA 预训练仅用 8×H100 训练 34 小时,约 272 H100-hours,而 OpenVLA 约 21,500 A100-hours。LAPA 还显示出只用 Something-Something V2 人类操作视频预训练也能正迁移,在真实机器人平均表现超过 OpenVLA(Bridge)。 |
| 阅读时要注意的点 | 重点不是“用视频预训练 VLA”本身,而是 latent action 是否真正成为跨 embodiment、跨环境的共享动作表示。阅读时要盯住三件事:量化模型学到的 token 是否语义可解释;latent pretraining 是否比 VPT/UniPi 这类无动作标签 baseline 更稳;最后少量 action finetuning 是否足以补齐从 latent action 到真实机器人动作的落差,尤其是细粒度 grasping。 |
一句话贡献
LAPA 用离散 latent action 把无动作标签视频变成可训练 VLA 的动作伪标签,从而把互联网/人类视频接入机器人策略预训练。
关键词
Vision-Language-Action Latent Action VQ-VAE Actionless Video Pretraining Cross-Embodiment Transfer
2. 研究问题与动机
2.1 为什么 action labels 是 VLA 的瓶颈
VLA 模型通常把 VLM 与 action head 连接起来,并在真实机器人轨迹上训练。问题是机器人动作标签来自遥操作,采集成本高、硬件依赖强、数据规模有限。OpenVLA 这类模型已经证明 action-labeled robot data 有价值,但它们仍受限于“必须有机器人动作”的数据来源。
相比之下,互联网视频和人类操作视频包含大量物理交互和任务行为。它们没有机器人 end-effector action、joint position 或 torque 标签,且 embodiment 与机器人不同。LAPA 的基本判断是:如果能从纯视觉变化中学出离散动作 token,就可以把这些视频变成 VLA 预训练数据。
2.2 为什么不是直接做 world model 或 IDM
视频 world model 路线可以生成未来帧,再用 inverse dynamics model 转动作,但论文认为这种方法在长 horizon 和精确 7-DoF 动作上容易受扩散规划和 IDM 误差影响。VPT 路线依赖 action-labeled 数据训练 IDM,再给视频打伪标签;这在跨环境时 IDM 不稳。LAPA 的区别是 latent action quantization 不需要真实动作标签,直接从两个视觉状态间的变化学习离散动作表示。
2.3 论文的核心假设
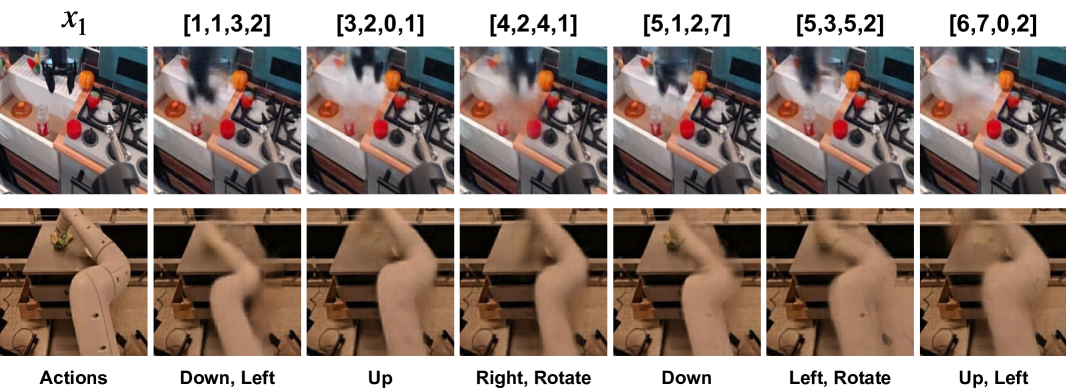
核心假设是:不同 embodiment 和环境中的可见状态变化,可以通过一个共享 latent action space 表达。这个空间不一定等价于真实机器人动作,但足够承载“向左、向下、靠近、抓取相关视觉变化”等粗粒度行为先验。后续少量 labeled robot data 再把这种先验对齐到具体机器人的动作空间。
4. 方法详解
4.1 总体流程
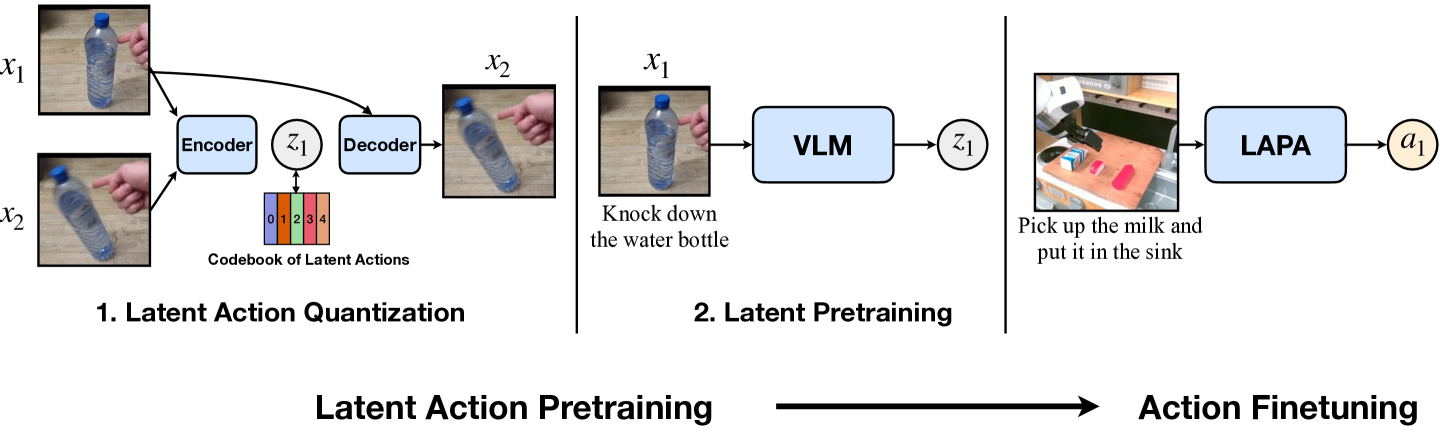
Latent Action Pretraining 包含两个顺序学习的模型和一个微调阶段:
- Latent Action Quantization。训练一个 encoder-decoder,用 \(x_t\) 和 \(x_{t+H}\) 学离散 latent action \(z_t\)。
- Latent Pretraining。用量化模型 encoder 给无动作标签视频打 latent action 伪标签,训练 VLM 从当前图像和语言指令预测 \(z_t\)。
- Action Finetuning。丢掉 latent action head,换成真实动作 head,用少量 robot action labels 学到可执行的 end-effector delta action。
4.2 Latent Action Quantization
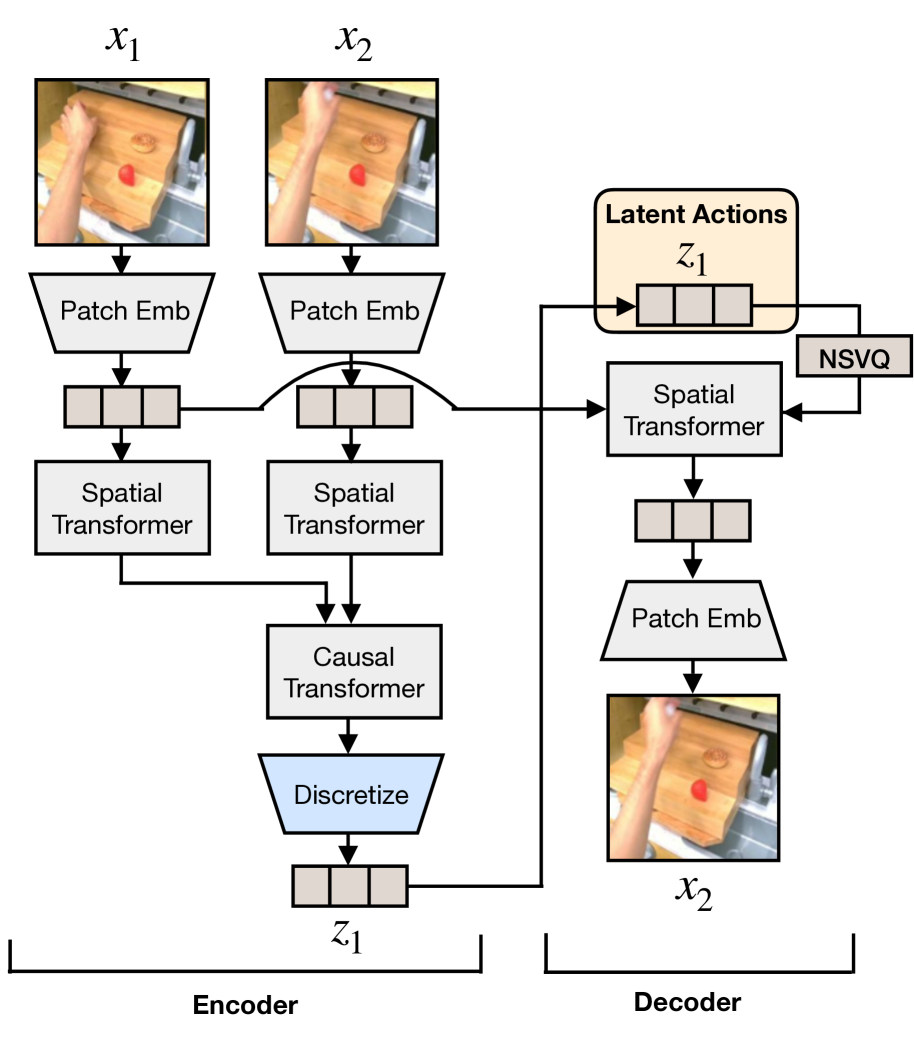
量化模型输入当前帧 \(x_t\) 和未来帧 \(x_{t+H}\),输出 latent action \(z_t\)。Encoder 同时看两帧,用 spatial transformer 和 temporal/causal transformer 得到连续 embedding;Decoder 输入 \(x_t\) 和 \(z_t\),重建 \(x_{t+H}\)。直觉上,\(z_t\) 被迫编码从当前观察到未来观察的“动作变化”。
论文基于 VQ-VAE objective,把连续差分 embedding 离散化到 codebook。附录 A 给出更具体的形式:两帧 patch embedding 后经 spatial transformer,再经 causal transformer 得到 \(e_1,e_2\),令 \(d_1=e_2-e_1\),并选最近 codebook token:
为避免 VQ-VAE 中常见的 codebook / representation collapse,作者采用 NSVQ,并在 decoder 中对当前帧 patch embedding \(p_1\) 施加 stop gradient。Decoder 使用 cross attention,让量化后的动作表示 attend 当前帧:
论文还说明,与 GENIE 式 additive embedding 相比,使用 cross attention empirically 更容易捕获语义上有意义的 latent actions。
4.3 Latent Pretraining
训练好量化模型后,用其 encoder 作为 inverse dynamics model:给定 \(x_t\) 和未来帧,标出 latent action \(z_t\)。然后训练预训练 VLM,输入当前图像 \(x_t\) 和视频语言指令,预测 \(z_t\)。这里使用单独的 latent action head,一个 MLP,输出 codebook vocabulary \(|C|\) 上的 token 分布。
默认训练设置中,vision encoder 冻结,language model 解冻。这个设计让预训练不依赖任何机器人动作标签,也不需要预设动作粒度,如 end-effector position、joint position 或 torque;动作粒度由观察变化本身决定。
4.4 Action Finetuning
latent action 不是可直接执行的机器人动作,所以最后需要少量 labeled trajectories。作者把连续机器人动作的每个维度按等频 bin 离散化,做类似 RT-2/OpenVLA 的 action token prediction。微调时丢掉 latent action head,重新初始化真实 action head;vision encoder 仍冻结,language model 解冻。
作者还尝试过保留 latent action head 再加额外 head 解码到真实动作,但效果不如重新初始化 action head。论文推测原因可能是底层 policy model 很大,直接微调新 action head 更容易适配真实机器人动作空间。
5. 实验与结果
5.1 实验设置
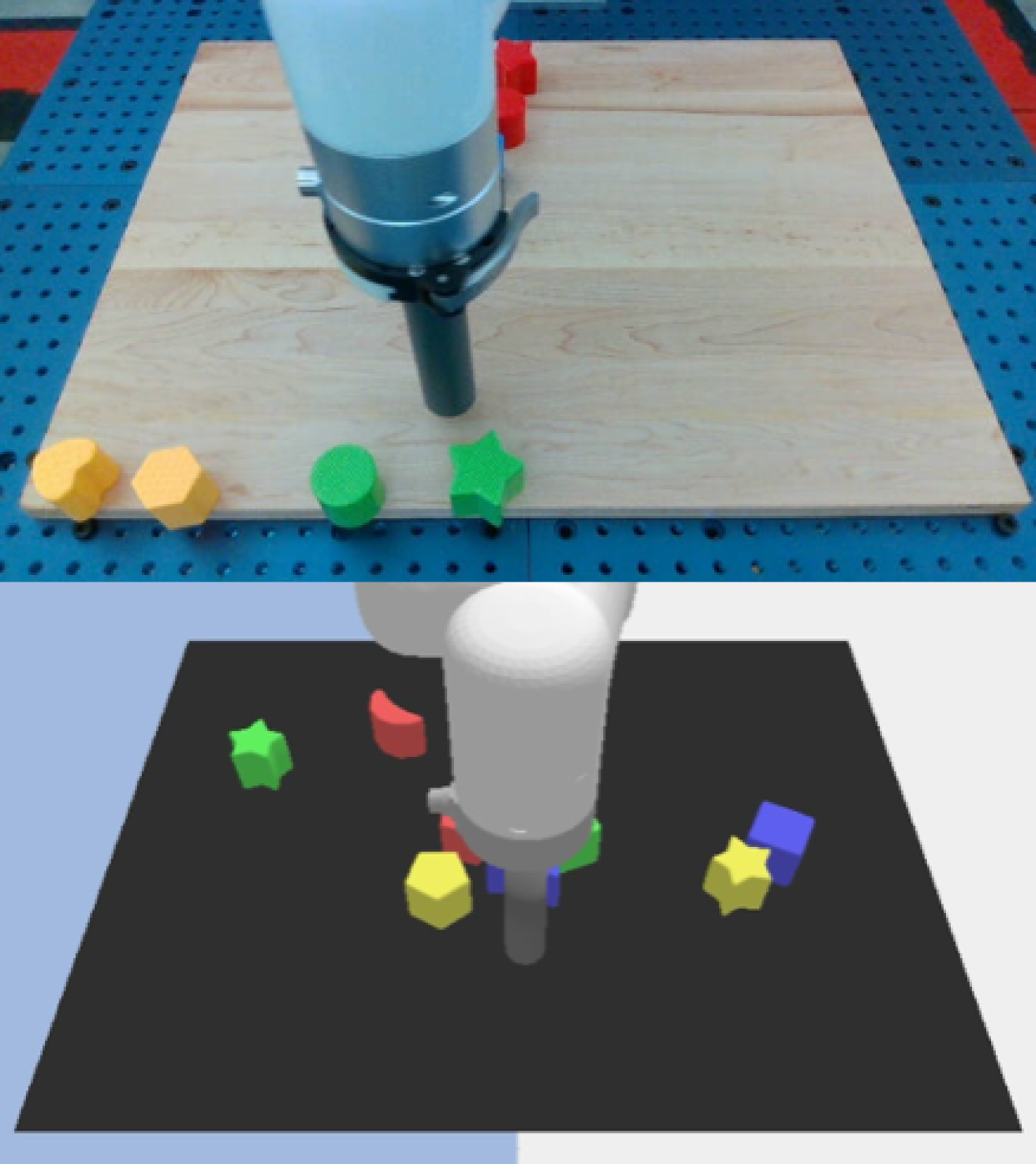
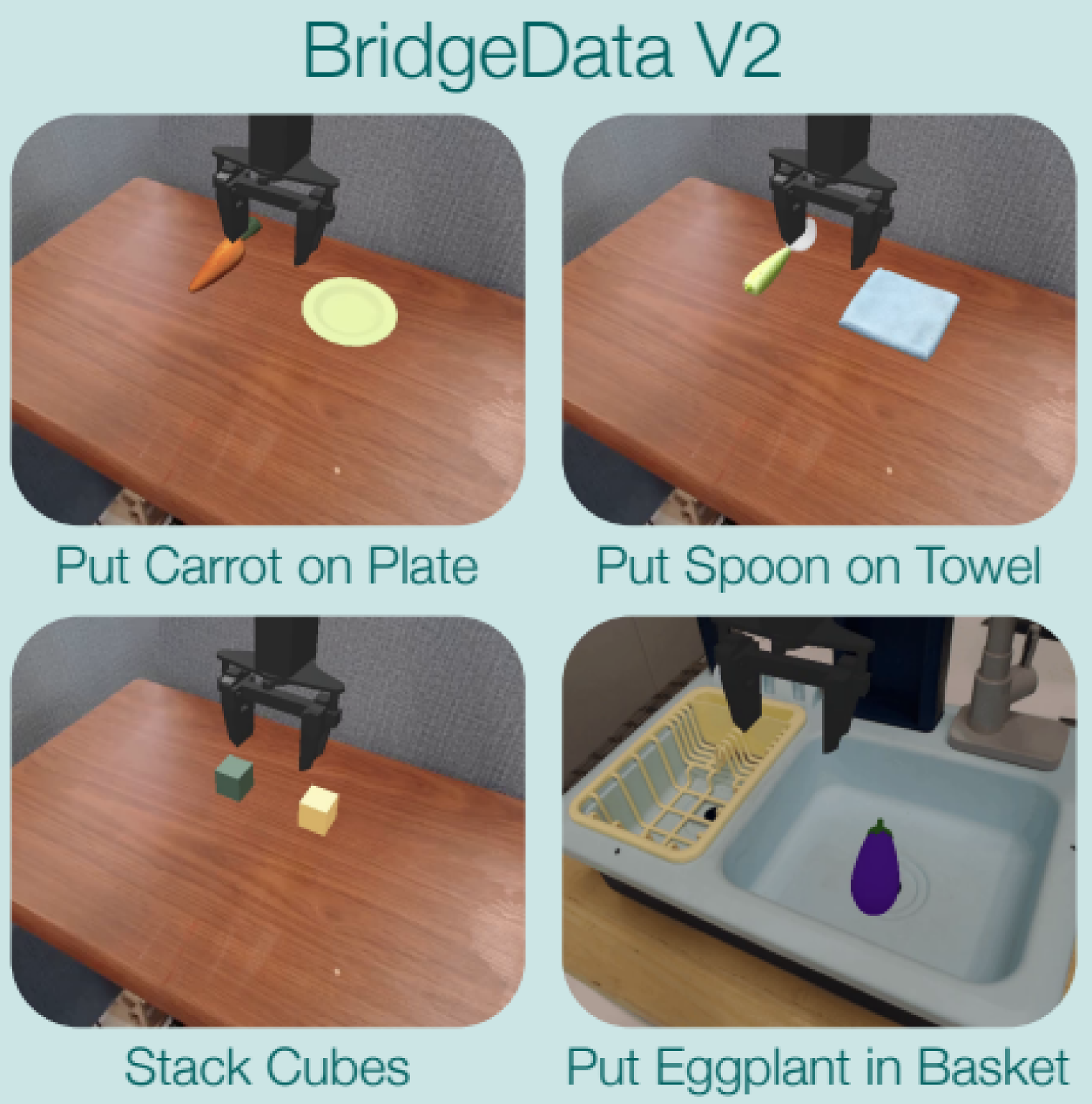
论文在 2 个仿真环境和 3 个真实机器人任务上评估,共覆盖 9 类任务。核心问题包括:跨任务、跨环境、跨 embodiment 是否正迁移;LAPA 是否能比 ground-truth action pretraining 更适合多 embodiment;仅用 human manipulation videos 是否也有效。
| 环境 | 类别 | 预训练数据 | 预训练轨迹 | 微调数据 | 微调轨迹 |
|---|---|---|---|---|---|
| LangTable | In-domain | Sim 5 tasks | 181k | 5 tasks, MT/MI | 1k |
| LangTable | Cross-task | Sim 5 tasks | 181k | 1 task, MI | 7k |
| LangTable | Cross-env | Real 5 tasks | 442k | 5 tasks, MT/MI | 1k |
| SIMPLER | In-domain | Bridgev2 | 60k | 4 tasks, MT | 100 |
| SIMPLER | Cross-emb | Something v2 | 200k | 4 tasks, MT | 100 |
| Real-world | Cross-emb | Bridgev2 | 60k | 3 tasks, MI | 450 |
| Real-world | Multi-emb | Open-X | 970k | 3 tasks, MI | 450 |
| Real-world | Cross-emb | Something v2 | 200k | 3 tasks, MI | 450 |

5.2 Baselines
底层 VLM 使用 7B Large World Model (LWM-Chat-1M)。主要 baseline 包括:SCRATCH,只在下游任务微调;UNIPI,用视频扩散模型生成 video rollouts,再用 IDM 转动作;VPT,用 action-labeled 数据训练 IDM,再给原始视频打 pseudo actions;ACTIONVLA,用 ground-truth robot action labels 预训练,可视作有标签上界;OpenVLA,现有 7B VLA baseline。
[附录 C] UNIPI diffusion model 用 batch 128 训练,推理时每执行两步重新规划;VPT 的 IDM 是 ResNet18 + MLP,用 Adam、学习率 \(10^{-4}\) 在单张 A6000 上训练;OpenVLA fine-tuning 默认 LoRA,batch size 32,直到 action accuracy 达到 95%。ACTIONVLA 和 LAPA 使用 batch size 128,并在真实机器人微调时使用 image augmentation。
5.3 Language Table 结果
| 方法 | In-domain Seen | In-domain Unseen | Cross-task Seen | Cross-task Unseen | Cross-env Seen | Cross-env Unseen |
|---|---|---|---|---|---|---|
| SCRATCH | 15.6 ± 9.2 | 15.2 ± 8.3 | 27.2 ± 13.6 | 22.4 ± 11.0 | 15.6 ± 9.2 | 15.2 ± 8.3 |
| UNIPI | 22.0 ± 12.5 | 13.2 ± 7.7 | 20.8 ± 12.0 | 16.0 ± 9.1 | 13.6 ± 8.6 | 12.0 ± 7.5 |
| VPT | 44.0 ± 7.5 | 32.8 ± 4.6 | 72.0 ± 6.8 | 60.8 ± 6.6 | 18.0 ± 7.7 | 18.4 ± 9.7 |
| LAPA | 62.0 ± 8.7 | 49.6 ± 9.5 | 73.2 ± 6.8 | 54.8 ± 9.1 | 33.6 ± 12.7 | 29.6 ± 12.0 |
| ACTIONVLA | 77.0 ± 3.5 | 58.8 ± 6.6 | 77.0 ± 3.5 | 58.8 ± 6.6 | 64.8 ± 5.2 | 54.0 ± 7.0 |
这个表的读法:LAPA 不用 action labels 预训练,但大幅超过 SCRATCH、UNIPI 和 VPT。在 in-domain 和 cross-env 中优势明显;cross-task unseen 中 VPT 稍高,作者解释 VPT 使用更多 labeled data 训练 IDM,伪标签可能更准。ACTIONVLA 用真实动作标签预训练,所以仍是强上界,尤其 cross-env。
5.4 真实机器人结果
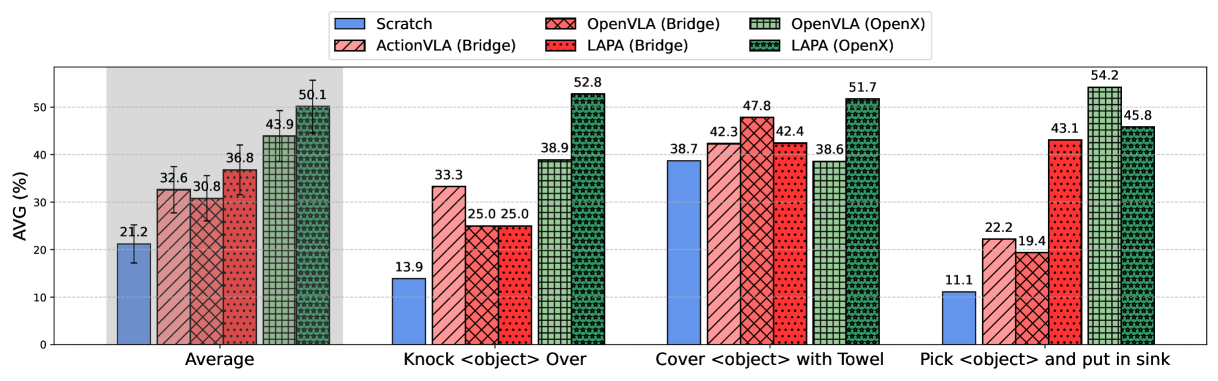
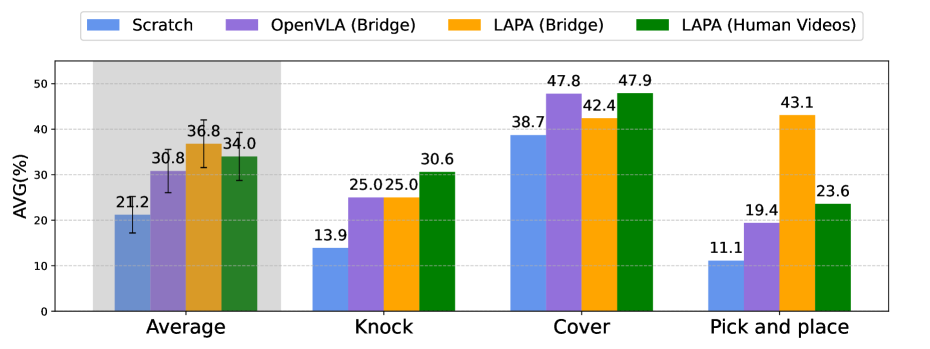
| 方法 | Seen Obj. Unseen Combo | Unseen Obj. | Seen Obj. Unseen Instr. | AVG |
|---|---|---|---|---|
| SCRATCH | 18.0 | 20.3 | 25.4 | 21.2 |
| ACTIONVLA (Bridge) | 38.3 | 31.8 | 27.7 | 32.6 |
| OPENVLA (Bridge) | 35.6 | 34.6 | 22.1 | 30.8 |
| LAPA (Bridge) | 43.4 | 31.4 | 35.6 | 36.8 |
| OPENVLA (Open-X) | 46.2 | 42.1 | 43.4 | 43.9 |
| LAPA (Open-X) | 57.8 | 43.9 | 48.5 | 50.1 |
| LAPA (Human Videos) | 36.5 | 37.4 | 28.1 | 34.0 |
最关键的比较是 LAPA(Open-X) vs OpenVLA(Open-X):LAPA 在三类泛化设置上都更高,AVG 50.1 vs 43.9。附录 G.3 的总表给出的 total success rate 更精确为 50.09% vs 43.87%。作者还指出在 pick-and-place 中 LAPA 不如 OpenVLA,主要失败来自 early grasping;但 LAPA 的 reaching success 高于 OpenVLA,说明它的语言条件和粗粒度规划更强,细粒度 grasping 仍需改进。
5.5 Human manipulation videos
作者用 Something-Something V2 的 220k 人类操作视频测试极端 embodiment gap。因为人类视频没有机器人动作标签,ACTIONVLA 不可训练;LAPA 仍能从视觉变化中学习 latent actions。
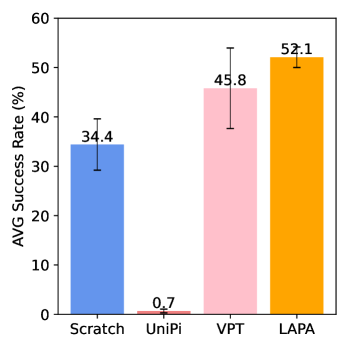
[附录 G.2] SIMPLER human-video 表格中,Success AVG:VPT 45.8,UNIPI 0.7,LAPA 52.1,LAPA(10%) 50.0;Moving AVG:VPT 66.6,UNIPI 27.1,LAPA 72.9,LAPA(10%) 62.5。这支持“人类视频也能正迁移”的主张,但也说明 10% 数据已经很接近完整数据,后续还需要更系统 scaling law。
5.6 SIMPLER 和效率
[附录 G.2] Bridgev2 pretraining 的 SIMPLER 表格显示,Success AVG:SCRATCH 34.4,UNIPI 1.3,VPT 51.0,LAPA 57.3,ACTIONVLA 63.5,OpenVLA 36.4。LAPA 明显优于无动作标签 baseline,并接近使用全 Bridgev2 action labels 的 ACTIONVLA。
效率方面,LAPA(Open-X) 使用 8 张 H100 训练 34 小时,batch size 128,总计约 272 H100-hours;OpenVLA 需要约 21,500 A100-hours,batch size 2048。作者据此认为 LAPA 预训练效率高约 30-40 倍,同时真实机器人结果仍优于 OpenVLA。
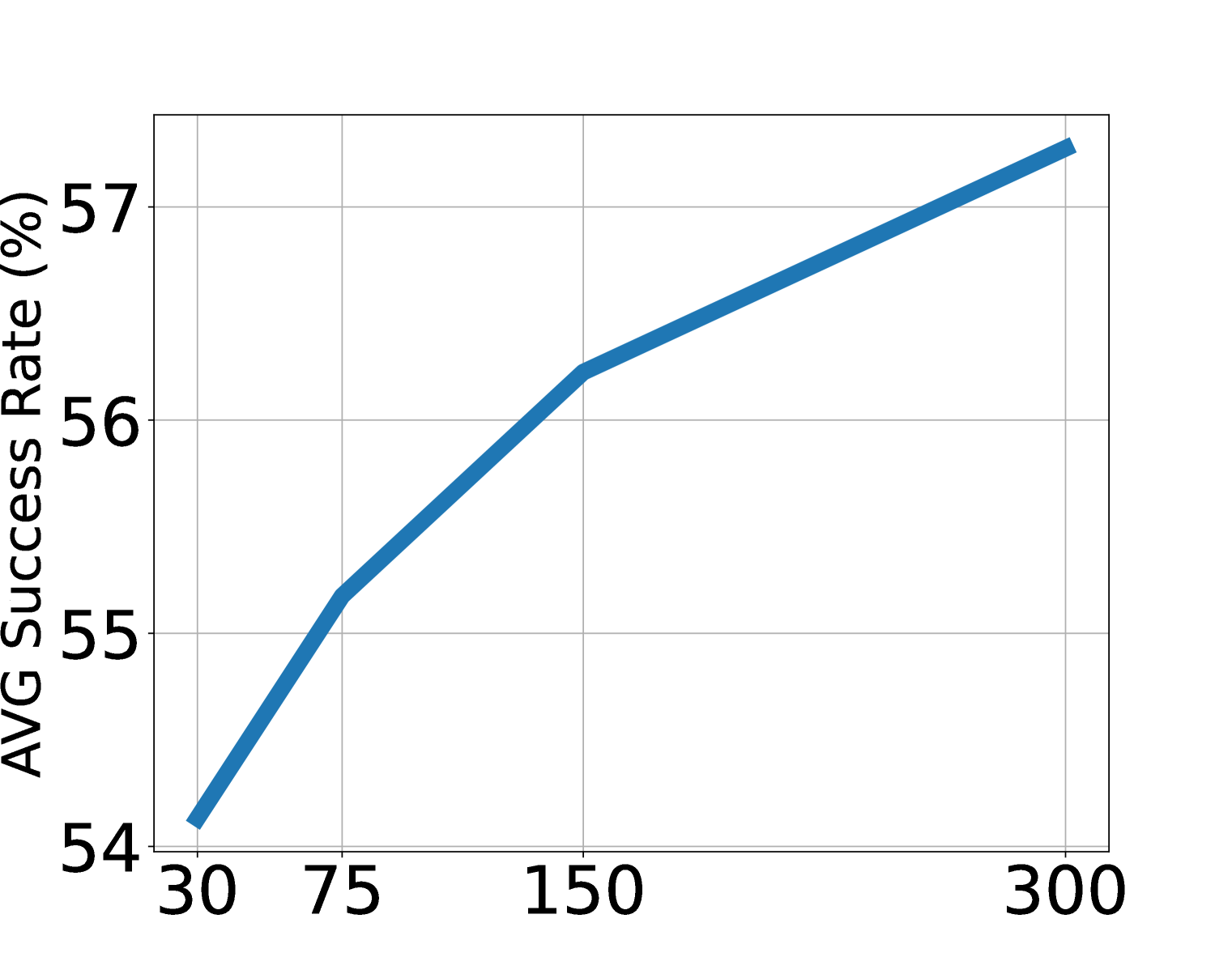
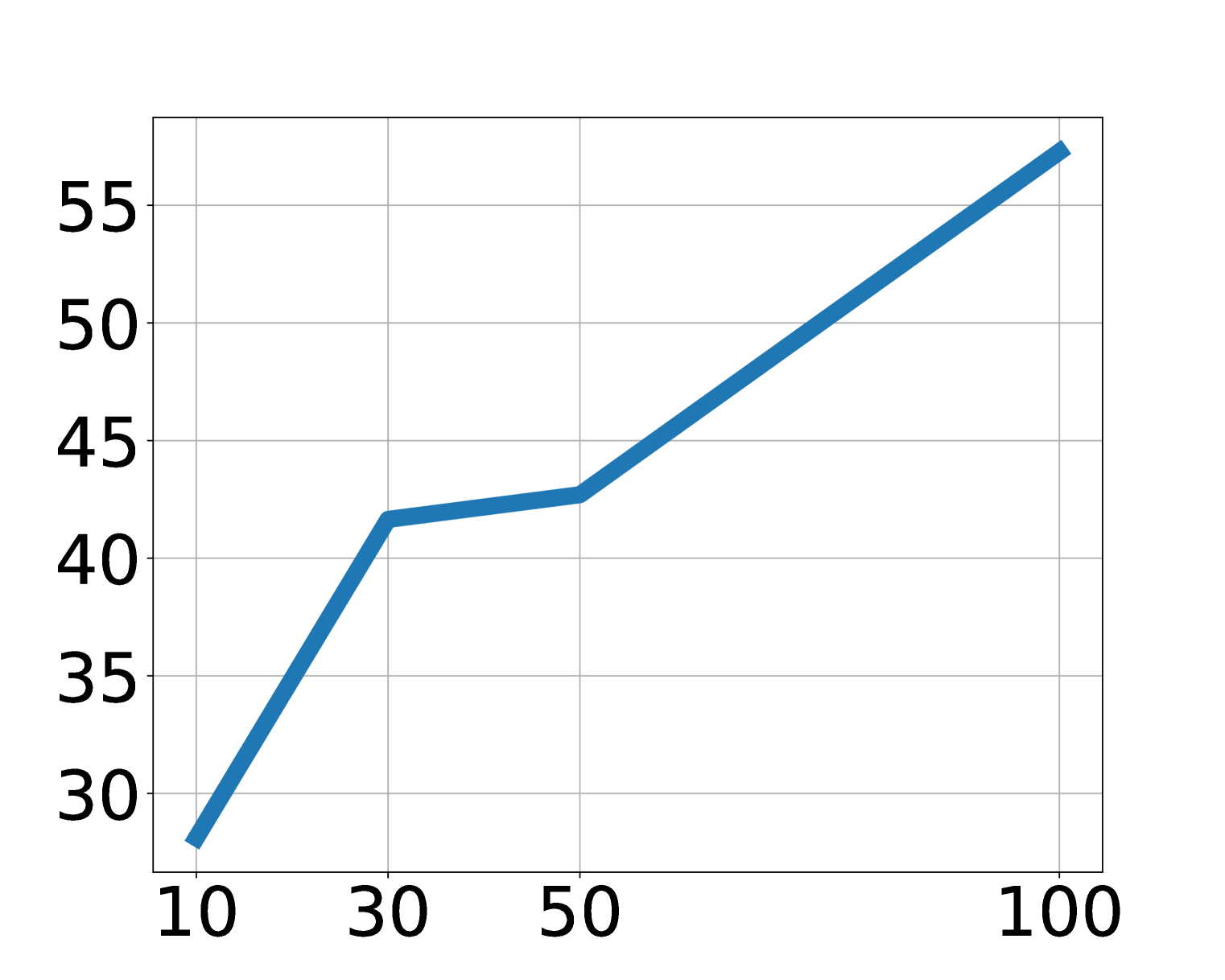
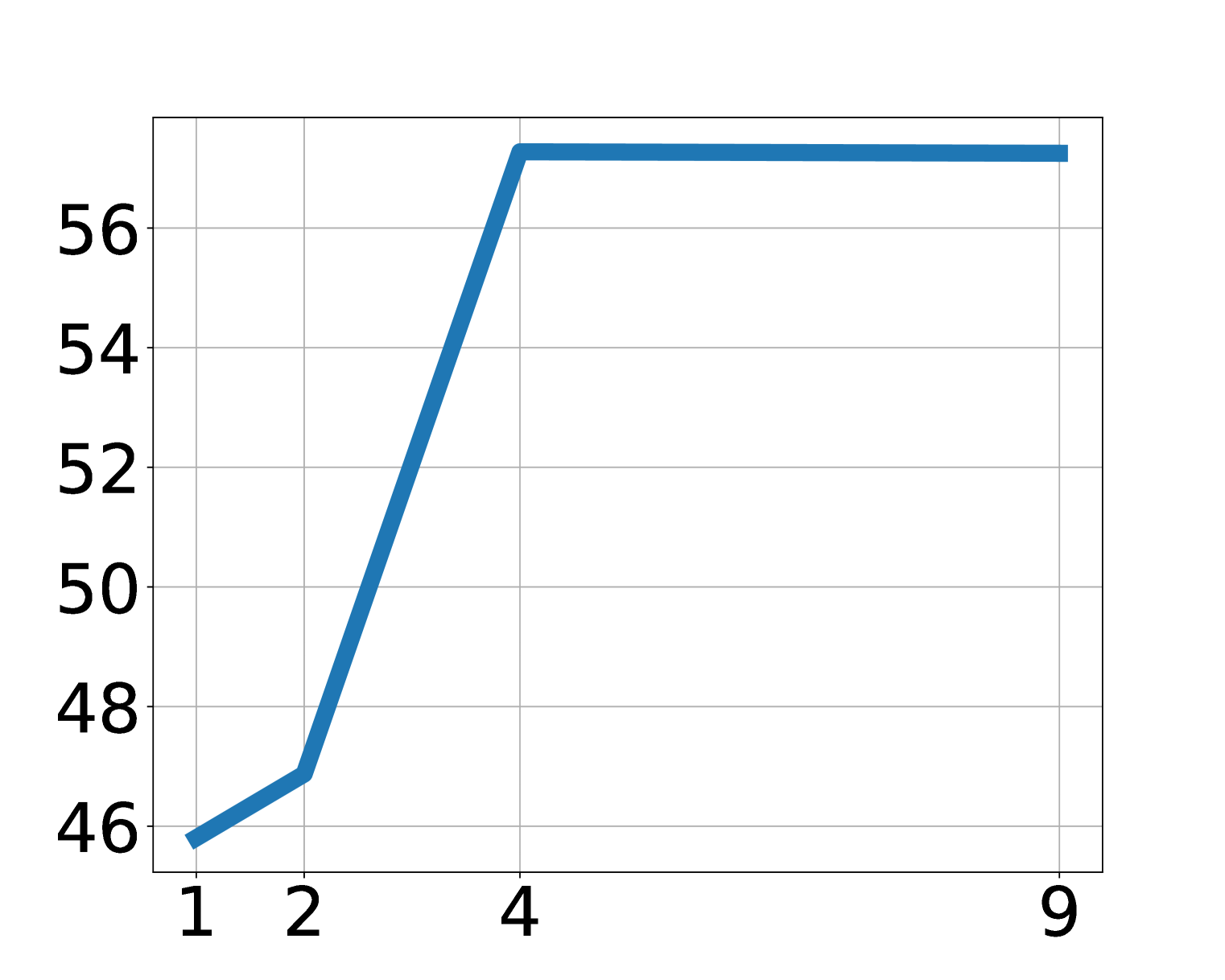
5.7 Scaling 和 latent action 分析
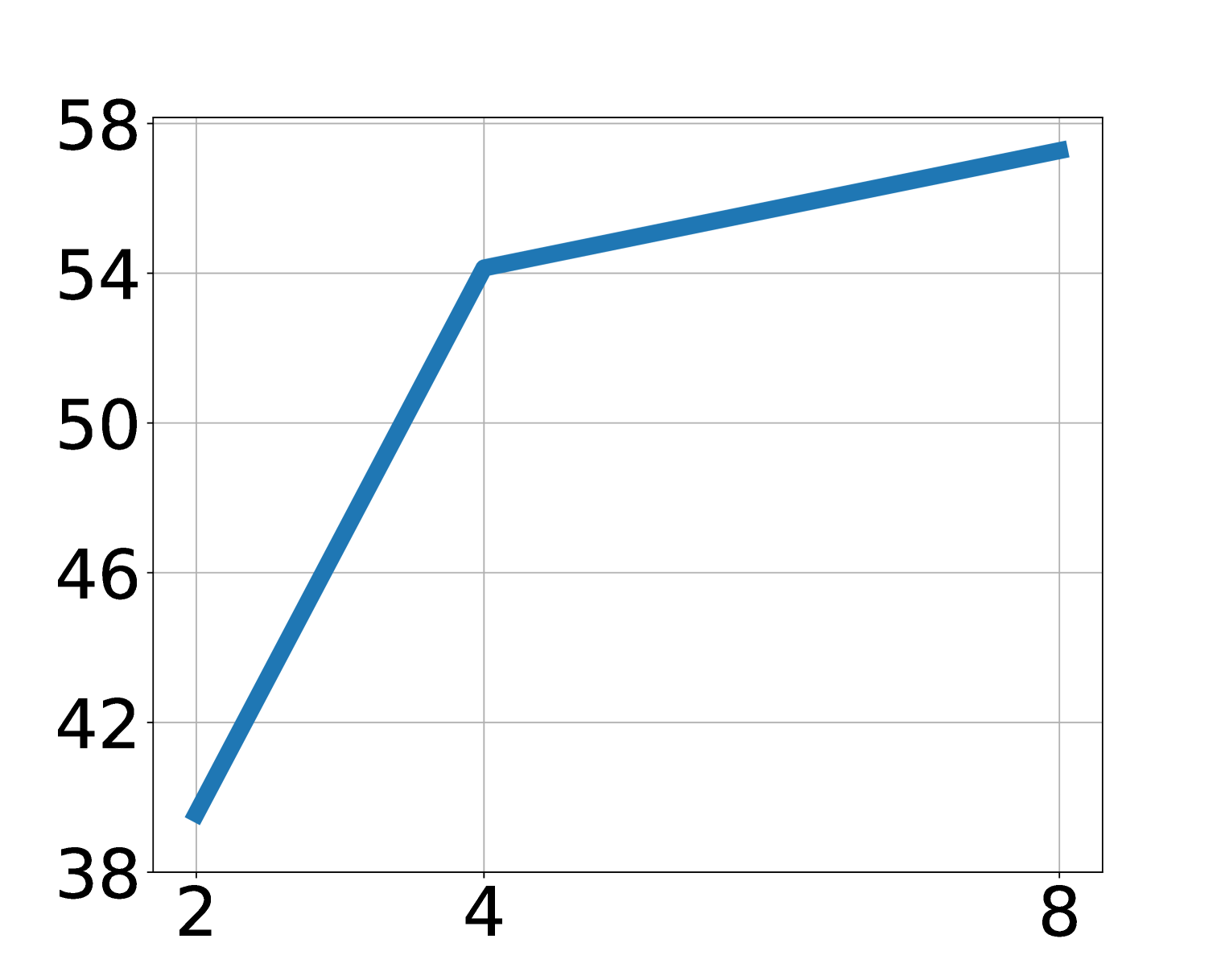
消融显示 LAPA 随模型大小、数据量和 latent action space 增大而改善。论文指出主实验中除了 Language Table 外,LAPA 的 generation space 维持在 \(8^4\)。对于视觉简单的 Language Table,增加 vocabulary 比增加 sequence length 更有效;对于更复杂操作,sequence length 和 vocab 都可能需要随动作维度扩展。

5.8 附录补充图表

6. 复现要点
6.1 Latent action quantization
[附录 A] 量化模型使用 C-ViViT 风格架构复现 GENIE 的 latent action model。输入两帧 \(x_1,x_2\),经过 patch embedding、spatial transformer、causal transformer 得到 \(e_1,e_2\),再对 \(d_1=e_2-e_1\) 做 codebook 最近邻量化。decoder 只含 spatial transformer,并用 cross attention 和 stop-gradient 的当前帧 embedding 重建未来帧。
窗口大小 \(H\) 按视频 fps 设定:机器人操作视频默认让未来帧约为当前帧后 0.6 秒;human manipulation videos 因帧间动态更慢,设置为约 2.4 秒。附录 F 显示 Bridgev2 上默认 \(H=3\),窗口过大性能下降。
6.2 Pretraining / finetuning 配置
- Backbone: 7B LWM-Chat-1M。
- Latent pretraining: 冻结 vision encoder,解冻 language model,新增 latent action MLP head。
- Action finetuning: 丢弃 latent head,重新初始化 action head;连续动作各维按等频 bin 离散化。
- LAPA(Open-X) 预训练: 8×H100,34 小时,batch size 128,约 272 H100-hours。
- OpenVLA 对比: 约 21,500 A100-hours,batch size 2048。
- 真实机器人微调: ACTIONVLA 和 LAPA 使用 batch size 128,并使用 image augmentation。
6.3 评估协议
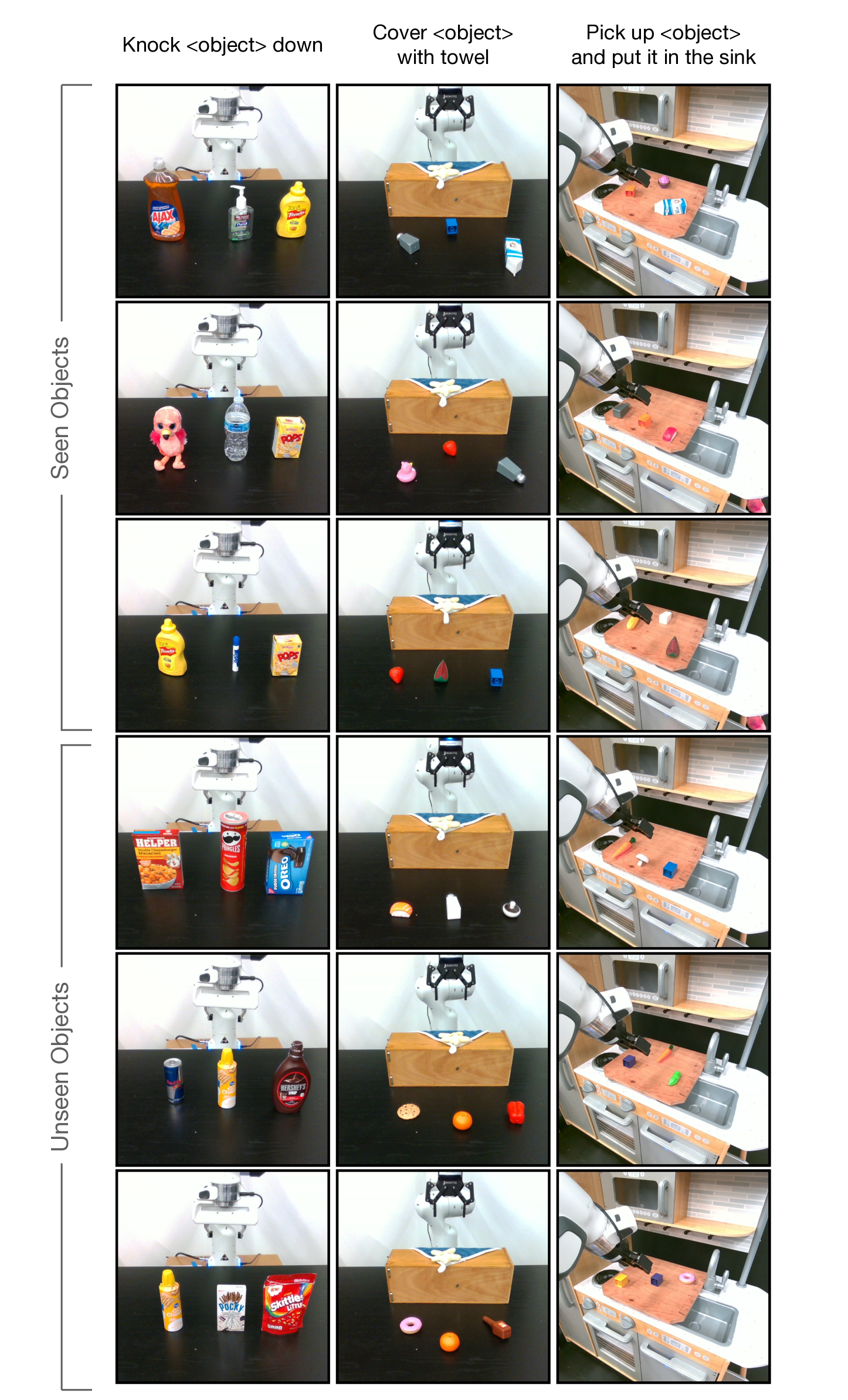
[附录 B] Language Table 每个 subtask category 评估 50 rollouts,5 类任务总计 250 rollouts/model/table。SIMPLER 每个任务评估 24 rollouts,随机化初始物体位置。真实机器人每个任务有 3 类评估能力:seen objects unseen combinations、unseen objects、seen objects unseen instructions;每类 6 rollouts,3 个任务合计 54 rollouts/model。
真实机器人部分使用 partial success:knocking 达到正确物体给 0.5,打倒给 1;covering 拿起毛巾 0.33,接触/部分覆盖 0.66,完全覆盖 1;pick-and-place 到达 0.25,抓取 0.5,移动到 sink 方向 0.75,放入 sink 1。
6.4 复现风险清单
- arXiv 源码限制: 这篇本地源码包只有一个 PDF 图源,报告图像主要从 arXiv HTML 渲染图下载;复现图表时建议以 PDF/HTML 交叉核对。
- latent action 空间超参: sequence length、vocab size、窗口 \(H\) 会影响动作粒度;不同环境最优值不同。
- 人类视频标注: LAPA 需要视频语言指令或描述;web 视频规模化时,视频文本质量会影响 latent pretraining。
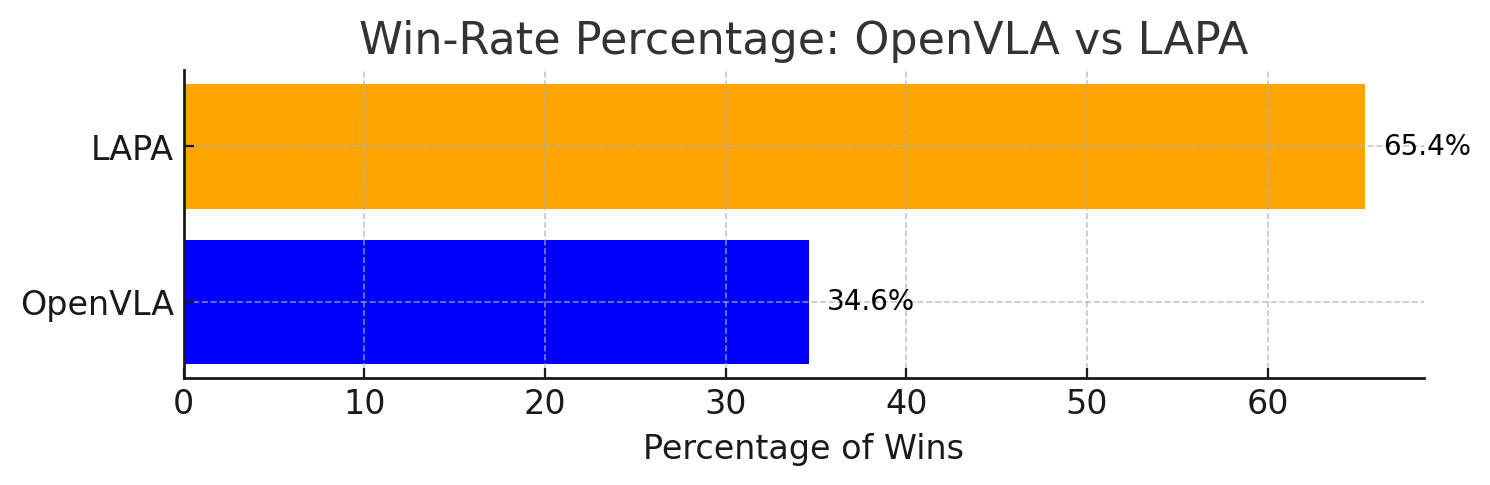
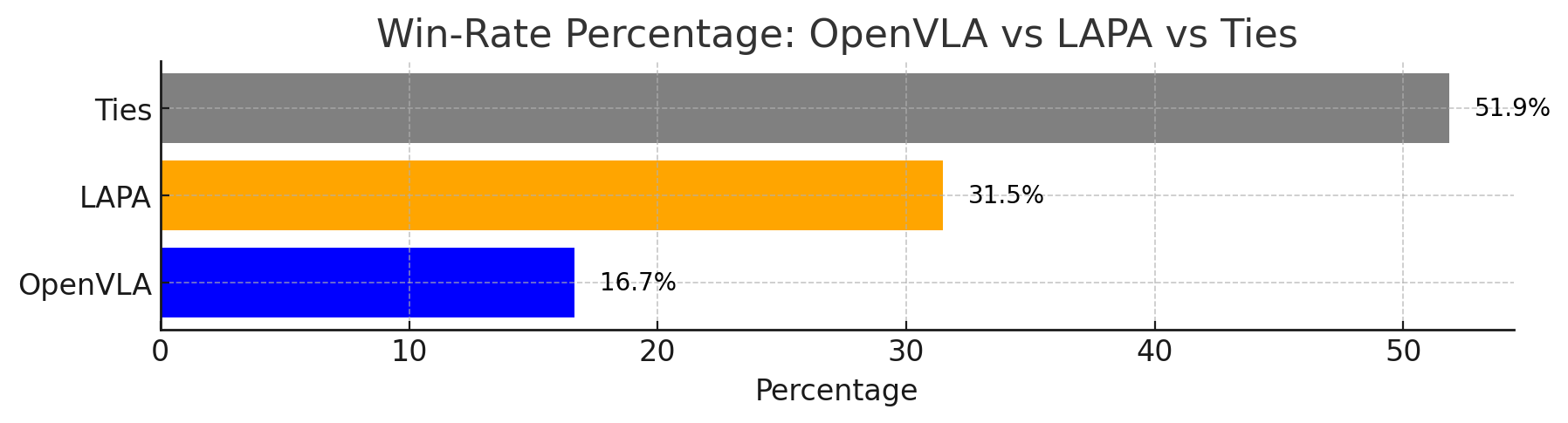
- 真实机器人方差: 54 rollouts/model 不算大,论文用 pairwise win rate 补充统计,但真实机器人评测仍可能受初始位置、物体属性、grasp 难度影响。
- 细粒度动作: grasping 是 LAPA 的主要短板,少量 finetuning data 可能不足以学好物体物理属性相关的抓取。
7. 分析、局限与边界
7.1 这篇论文最有价值的地方
最有价值的地方是把“没有动作标签的视频”变成了 VLA 可消费的动作预训练信号。相比只学视觉表征或生成未来视频,LAPA 明确学习离散 latent action token,并把它接到 monolithic VLA 的 action prediction 训练目标上。这使得互联网视频、人类操作视频和多 embodiment 机器人视频都可能进入同一个预训练范式。
第二个价值点是证据链覆盖了跨任务、跨环境、跨 embodiment 和 human-to-robot 场景。论文不仅在 Language Table / SIMPLER 中比较无标签预训练 baseline,还在真实机器人上与 OpenVLA 对比,并分析预训练任务分布与下游任务的关系。这让“latent action 是共享动作空间”这个主张不只停留在方法直觉上。
7.2 结果为什么站得住
结果相对站得住,首先因为 baseline 设计比较有针对性:SCRATCH 衡量没有预训练,UNIPI 衡量视频生成式规划,VPT 衡量 IDM 伪标签,ACTIONVLA 衡量有真实动作标签的上界,OpenVLA 衡量现有 VLA。LAPA 在多个无动作标签 baseline 之上有稳定提升,并在真实机器人 Open-X 设置中超过 OpenVLA。
其次,附录补充了大量分解证据:Language Table 每类任务详细表格、SIMPLER success/grasping/moving 分解、真实机器人三类能力分解、pairwise win rate、latent action 语义可视化和 scaling 消融。这些证据共同说明 LAPA 的提升不是单一表格偶然现象,而是来自可解释的 latent action 表示和数据规模/动作空间扩展。
7.3 论文明确局限
- 细粒度动作不足: LAPA 在 grasping 等 fine-grained motion generation 上不如 action-labeled pretraining,作者认为扩大 latent action generation space 可能有帮助。
- 实时推理延迟: 与其他 VLA 类似,LAPA 也有 real-time inference latency 问题。作者建议未来使用 hierarchical architecture,让小 head 高频预测动作。
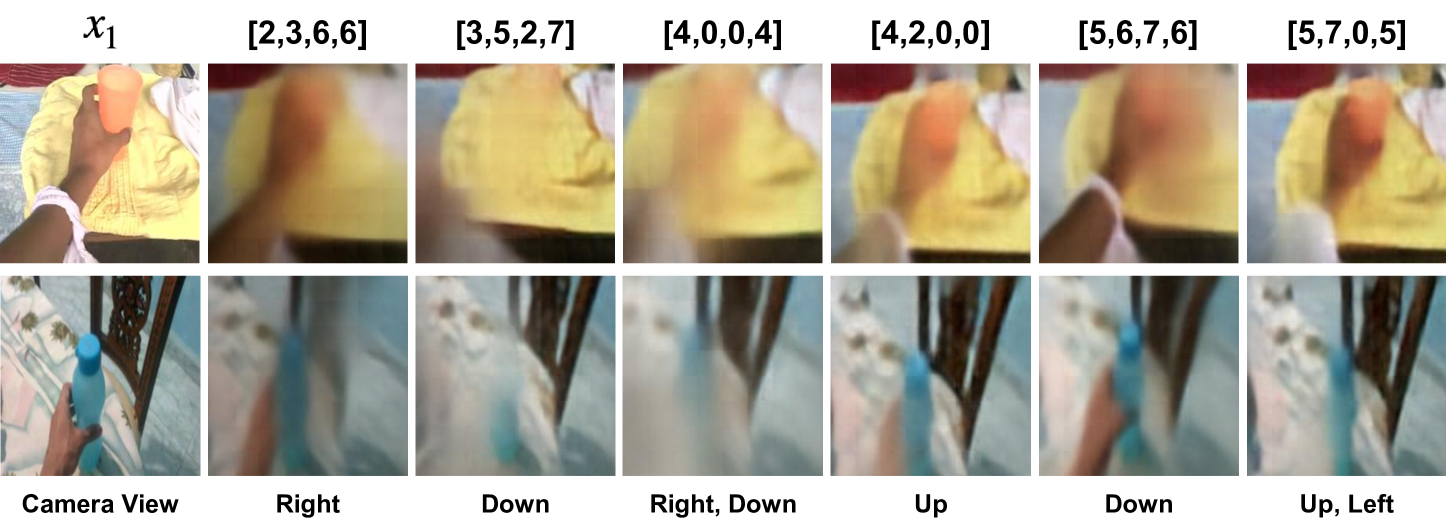
- 应用范围尚窄: 虽然 latent action 捕获了 camera movements,但论文还没有探索自动驾驶、导航、景观视频等非 manipulation 视频。
7.4 额外边界与可追问点
- latent action 与真实控制不是同构: 它从视觉变化中学习,可能混合相机运动、物体运动和机器人动作;这对人类视频有用,但也可能让真实动作解码更难。
- 少量 action finetuning 仍不可省: LAPA 降低了对 action labels 的依赖,但并没有完全消除真实机器人动作数据需求。
- 任务分布很重要: 附录 D 显示 Sthv2 在 knocking/covering 相关轨迹多,Bridgev2 在 pick-and-place 多;预训练数据是否包含相似技能仍强烈影响下游。
- 世界模型能力仍是定性展示: Figure 7 展示 latent decoder 闭环 rollout,但这还不是严格的可交互物理仿真评测。
8. 组会问答准备
Q1: LAPA 和 VPT 都用伪动作标签,区别是什么?
VPT 先用 action-labeled 数据训练 IDM,再用 IDM 给视频打 pseudo actions;所以 IDM 质量和环境迁移很关键。LAPA 的 latent action quantization 不需要真实动作标签,直接从两个视觉状态间的变化学离散 token,因此更适合 actionless videos 和跨 embodiment 数据。
Q2: latent action 是不是可以直接执行?
不能。latent action 是视觉变化 token,不是 end-effector delta action。LAPA 必须经过 action finetuning,使用少量带真实动作标签轨迹,把预训练先验映射到具体机器人动作空间。
Q3: 为什么 LAPA 可能比 action-labeled pretraining 更适合多 embodiment?
真实动作标签在不同机器人中坐标、关节、控制频率和动作空间都不同,直接混合可能引入 representation mismatch。LAPA 学的是观察变化的 latent token,更像语言/图像表示那样跨数据集共享,因此在 Open-X multi-embodiment 设置中有正迁移。
Q4: 论文中最强的定量证据是什么?
真实机器人总成功率:LAPA(Open-X) 50.09%,OpenVLA(Open-X) 43.87%;同时 LAPA 预训练约 272 H100-hours,OpenVLA 约 21,500 A100-hours。这个结果同时支持性能和效率两个主张。
Q5: 最需要质疑的地方是什么?
主要是细粒度动作和真实机器人统计量。LAPA 在 pick-and-place 的 grasping 上仍弱于 OpenVLA,说明 latent action 的粗粒度先验不等于精确控制;真实机器人 54 rollouts/model 也仍有限,需要更多任务和更大规模真实评测来确认泛化。