3DFlowAction: Learning Cross-Embodiment Manipulation from 3D Flow World Model
1. 论文速览
| 论文要解决什么 | 机器人数据动作空间不统一,例如关节角、末端位姿、坐标系和硬件形态各不相同,导致跨机器人学习困难;同时直接从视频生成未来 RGB 状态又容易受背景、机械臂外观和 2D 平面限制影响。论文要解决的是:能否用一种对象中心、3D、跨 embodiment 的运动表示,从人类和机器人视频中学习可用于真实机器人操作的动作线索。 |
|---|---|
| 作者的方法抓手 | 核心抓手是 3D optical flow。作者构建 ManiFlow-110k,将开源人类/机器人视频中的被操作物体运动抽成 3D 光流;训练一个基于 AnimateDiff 的 3D flow world model,按语言和当前场景预测被操作物体未来 3D 运动;再通过 rendering + GPT-4o 验证形成闭环规划,并把 3D flow 作为优化约束求解末端执行器动作。 |
| 最重要的结果 | 四个真实操作任务总成功率达到 70.0%,高于 AVDC 20.0%、ReKep 20.0%、Im2Flow2Act* 25.0%;与模仿学习方法相比,3DFlowAction 为 70.0%,高于 PI0 50.0% 和 Im2Flow2Act 27.5%。跨平台上,Franka 67.5%、XTrainer 70.0%,且不需要硬件特定微调。 |
| 阅读时要注意的点 | 重点不是“又一个 world model”,而是 3D flow 是否真的能作为统一动作接口。要特别看:2D flow 与 3D flow 的差异、GPT-4o rendering 验证是否可靠、optimization policy 是否能处理接触/遮挡/非刚体,以及实验只有每任务 10 次 trial,统计稳定性需要谨慎。 |

2. 动机与问题定义
2.1 为什么需要 3D flow
作者从人类操作的直觉出发:人在执行“把杯子挂到杯架上”之前,往往先想象物体在空间中如何移动,而不是先想关节角怎么变化。这个物体运动轨迹对人类和不同机器人都是相对通用的。因此,论文把“物体未来 3D 运动”当成 embodiment-agnostic 的 action representation。
相比 RGB 视频 world model,3D flow 更对象中心,能减少背景和机器人外观的干扰;相比 2D optical flow,3D flow 能表达深度方向移动、旋转、倾倒等 3D 轨迹,对倒茶、插笔、挂杯这类任务尤其重要。
2.2 问题设定
输入是当前 RGB 观察、任务语言和初始物体点集,输出是时序 3D optical flow:
其中前两个通道为图像平面 2D 坐标,第三个通道为深度,第四个通道为 visibility。该 flow 描述被操作物体表面点在未来各时刻的 3D 位置变化。
之后,系统不训练一个硬件绑定动作头,而是把 flow 变成约束函数,通过优化求解一串 end-effector poses in SE(3)。
2.3 贡献定位
- 提出 3DFlowAction,将 3D optical flow 作为统一、对象中心、跨 embodiment 的机器人操作表示。
- 构建 ManiFlow-110k,通过 moving object auto-detect pipeline 从多源人类和机器人视频中合成 110k 个 3D flow 样本。
- 训练 3D flow world model,从大规模 flow demonstrations 中学习语言条件下的物体 3D 运动模式。
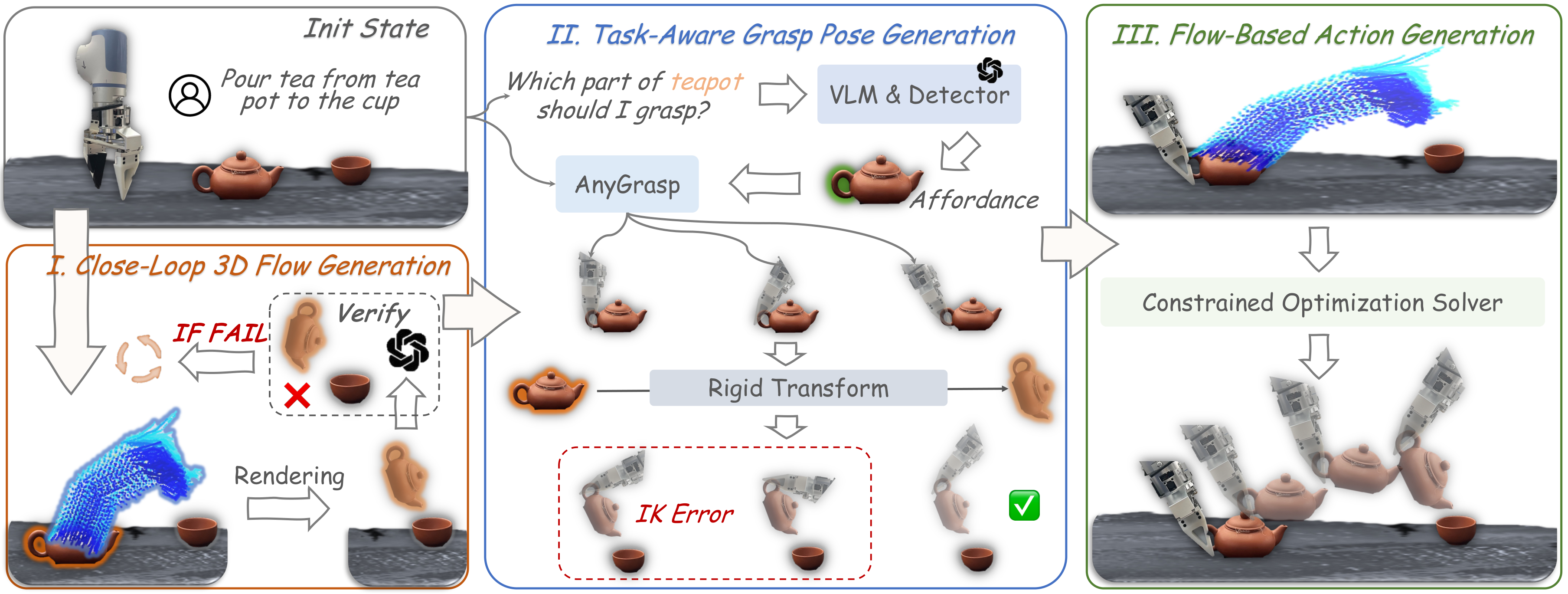
- 提出 flow-guided rendering + GPT-4o 验证的闭环规划,以及 task-aware grasp pose generation 和 flow-conditioned optimization policy。
- 在四个复杂真实任务、跨机器人平台、OOD 物体和背景上验证泛化。
4. 方法详解
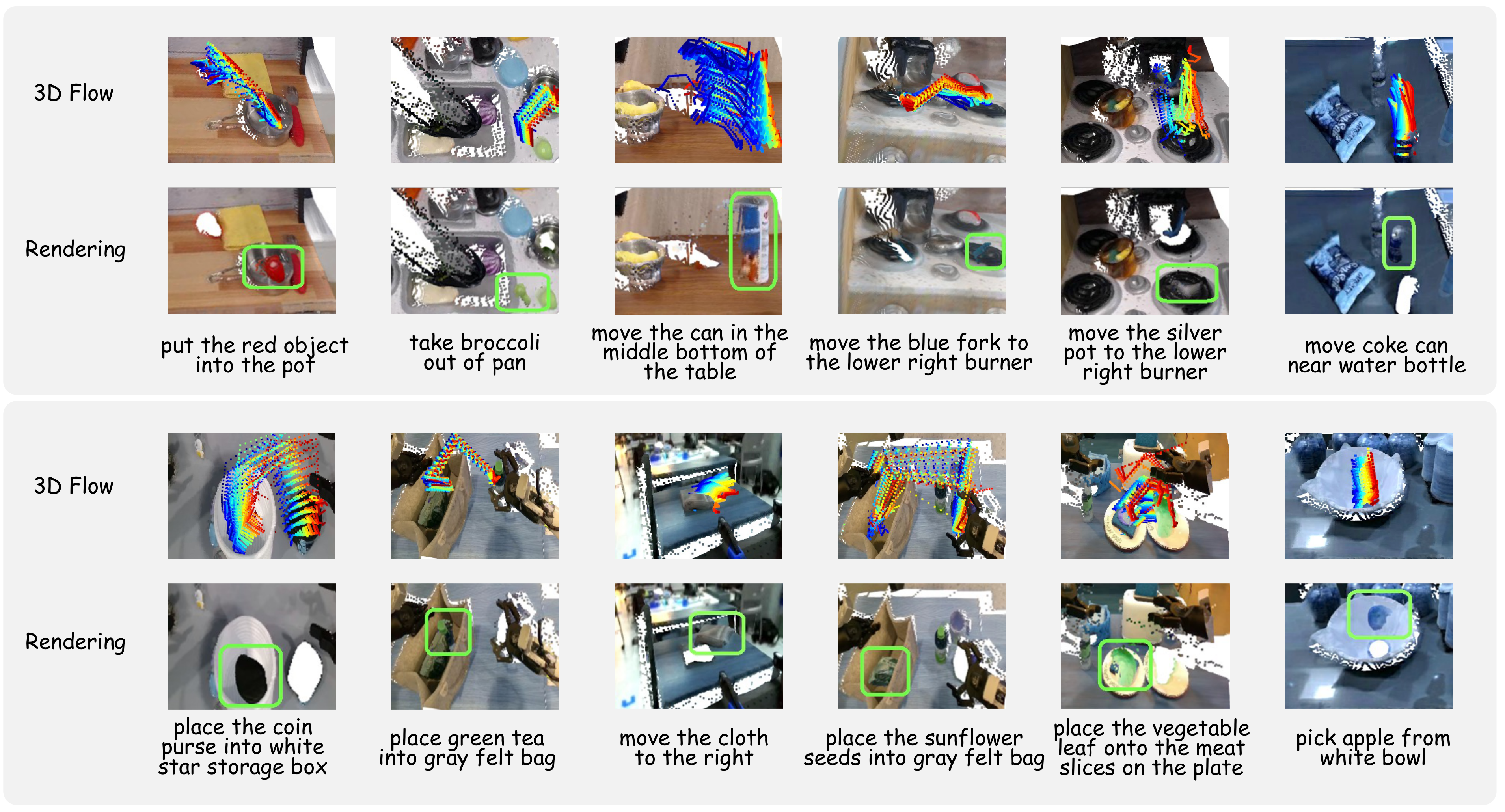
4.1 ManiFlow-110k: 从原始视频抽取 3D flow
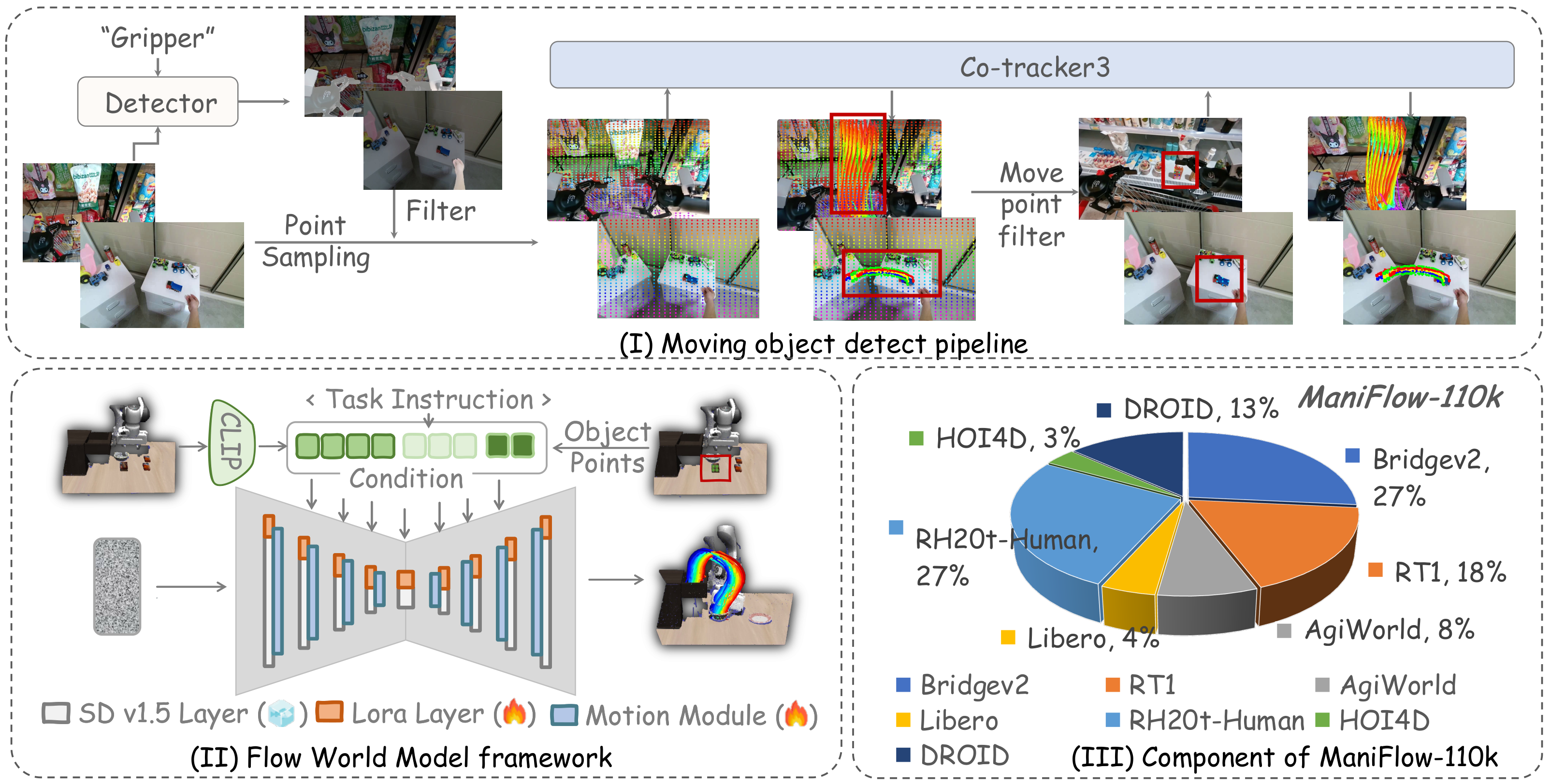
论文首先需要大量“物体如何运动”的数据。开源机器人/人类视频常有杂乱背景、相似物体和机械臂夹爪,标准 detector 很容易检测错。作者提出 moving object detection pipeline:
- 用 Grounding-SAM2 在第一帧分割 gripper mask。
- 在第一帧全图采样点,并排除落在 gripper mask 内的点。
- 用 CoTracker3 跟踪这些点,找出视频中显著运动的点。
- 用这些运动点的最大 bounding box 定位被操作物体。
- 再次用 CoTracker3 提取物体 2D optical flow。
- 必要时移除 camera motion flow。
- 用 DepthAnythingV2 预测深度,将 2D flow 投影到 3D。
作者在 BridgeV2 上验证该 pipeline 的 moving object detection accuracy 超过 80%。最终从 BridgeV2、RT1、AgiWorld、Libero、RH20T-Human、HOI4D、DROID 等开源数据生成 110k 个 3D flow 实例。
4.2 3D Flow World Model
模型目标是根据初始 RGB observation、任务 prompt 和初始点 $F_0$,生成时变 3D flow $F$。作者沿用 Im2Flow2Act 的思路,使用 AnimateDiff 作为 optical flow generator,但做了关键调整:
- RGB observation 和 task prompt 用 CLIP encoder 编码。
- 初始点 $F_0$ 用 sinusoidal positional encoding。
- 不把 3D flow 压缩进 Stable Diffusion 的 image VAE latent,因为作者发现 VAE 难以编码深度信息。
- 直接把 3D flow 输入 U-Net,并训练 motion module 建模时间动态。
- SD 主体只插入 LoRA 层,以保留预训练生成能力;motion module 从零训练。
4.3 Closed-Loop Motion Planning
3D flow 预测仍可能出错。为提高稳定性,作者设计 object-centric target state rendering machine。设第一时刻的 flow points 为 $P_1$,最后时刻为 $P_2$,通过 SVD 估计二者之间的刚体变换:
然后将 $T$ 应用于被操作物体初始点云,得到预测目标状态,再放回当前 3D scene point cloud 并重投影为 2D 图像。最后把任务指令和预测图像输入 GPT-4o,判断该 flow 是否与任务对齐;若失败则重新预测 flow。这个机制把一次性 world model 采样改成了带验证的闭环规划。
4.4 Task-Aware Grasp Pose Generation
抓取位姿如果选错,目标位置可能不可达或任务不可完成。作者让 GPT-4o 根据任务输出应该抓取的物体部位,再用 AnyGrasp 在该部位周围生成候选抓取姿态。由于 AnyGrasp 本身不知道任务,系统会用前面估计的变换矩阵 $T$ 将候选抓取姿态变换到目标状态,并用机器人 IK 检查可达性,从而选择任务相关且可达的抓取姿态。
4.5 Flow-Based Action Generation
动作生成被表述为约束优化。首先从物体表面通过 farthest point sampling 选 $N$ 个关键点,获得这些点对应的预测 3D flow。每个时间步 $t$ 的目标是让当前物体关键点到达 flow world model 预测的位置:
真实场景中还加入 IK 和碰撞检测。单臂机器人的决策变量是 end-effector pose,即位置和 Euler angles 的 6 维变量;位置受 workspace bounds 限制,旋转限制在下半球。优化实现沿用 ReKep 风格,初次迭代用 Dual Annealing 做全局搜索,再用 SLSQP 局部优化;后续迭代用上一阶段解初始化并只做局部优化。
5. 实验与结果
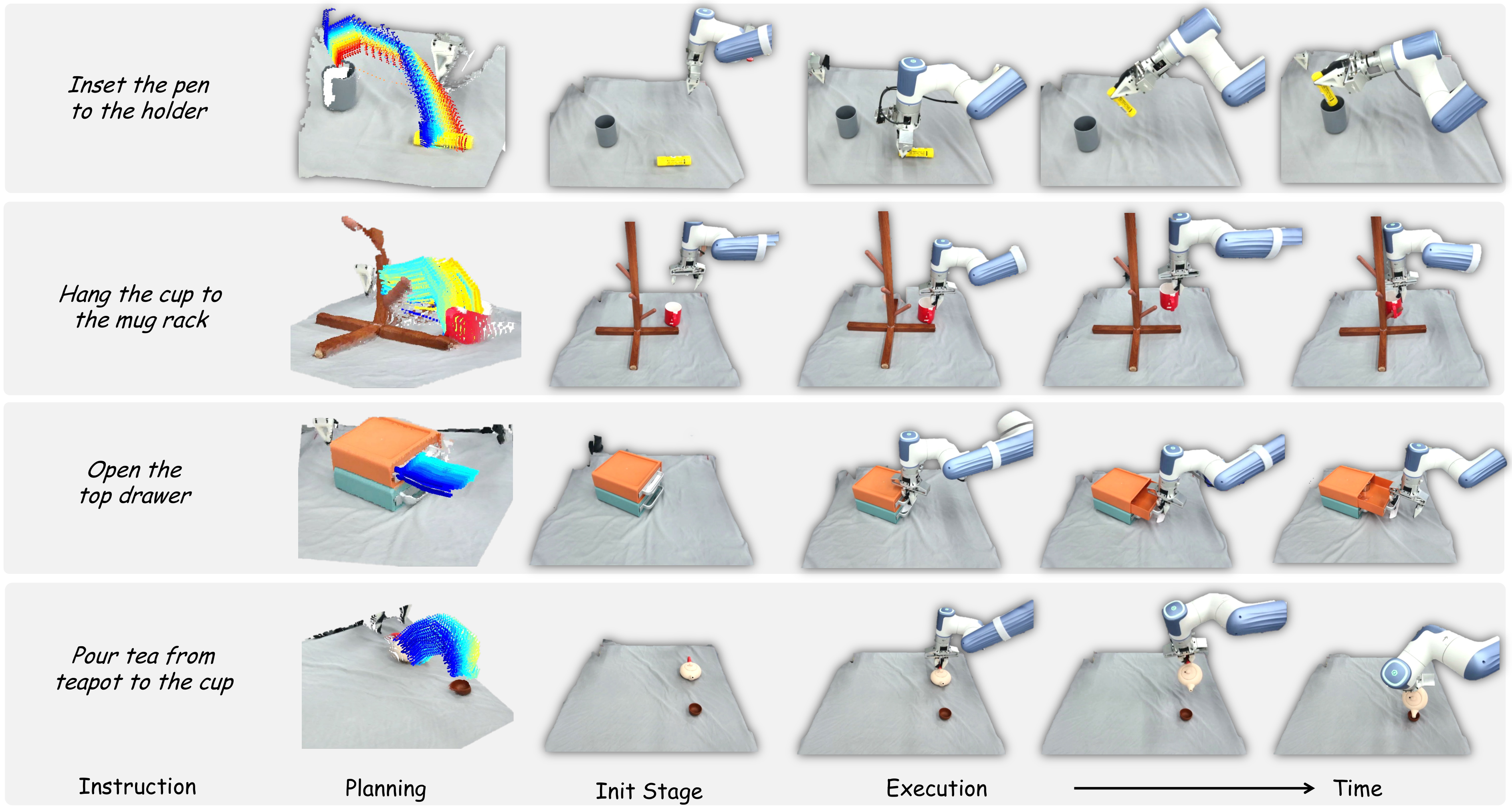
5.1 实验设置
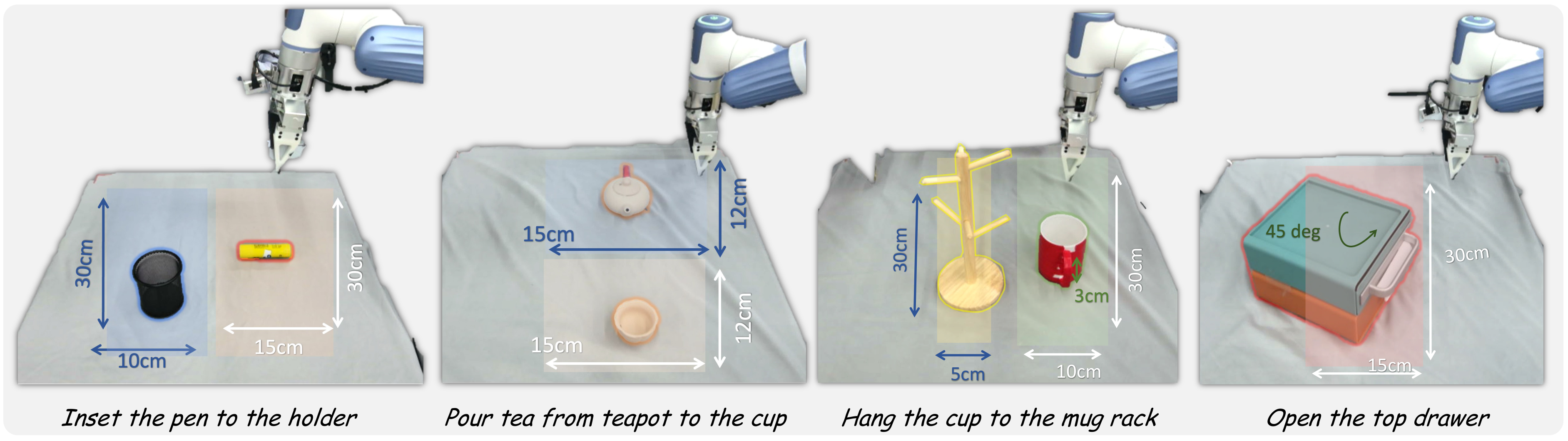
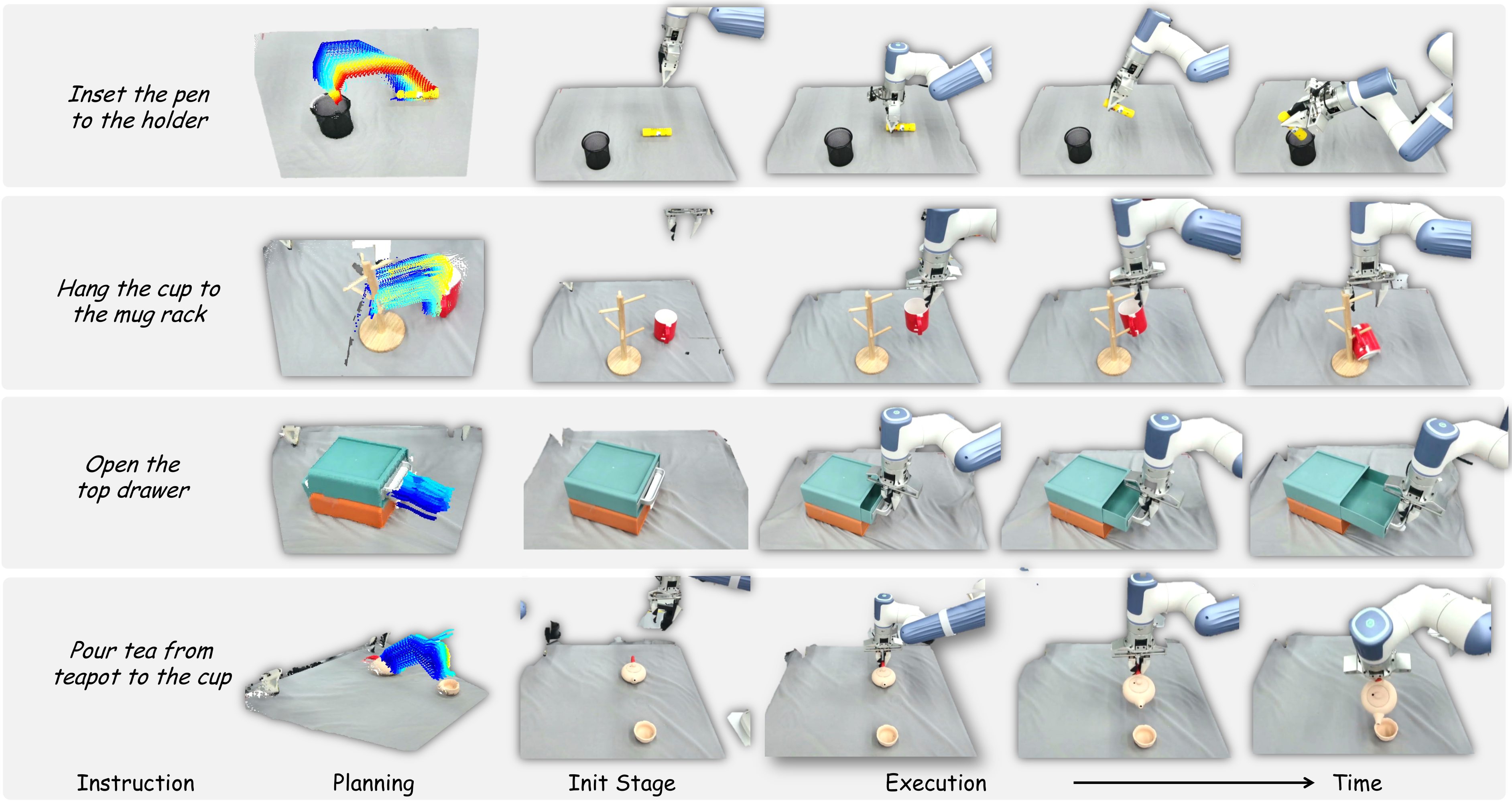
实验集中在四个基础但空间要求较高的任务:从茶壶倒茶到杯中、把笔插入笔筒、把杯子挂到杯架、打开上层抽屉。每个设置 10 次 trial,物体位姿随机,报告成功率。真实硬件使用 Dobot XTrainer,感知使用一个 Femto Bolt camera,位于机器人对侧,提供第三人称视角。
微调数据方面,作者每个任务手动收集 30 条人类手部示范,不包含机器人 action labels,约每任务 10 分钟,用于 fine-tune 3DFlowAction。
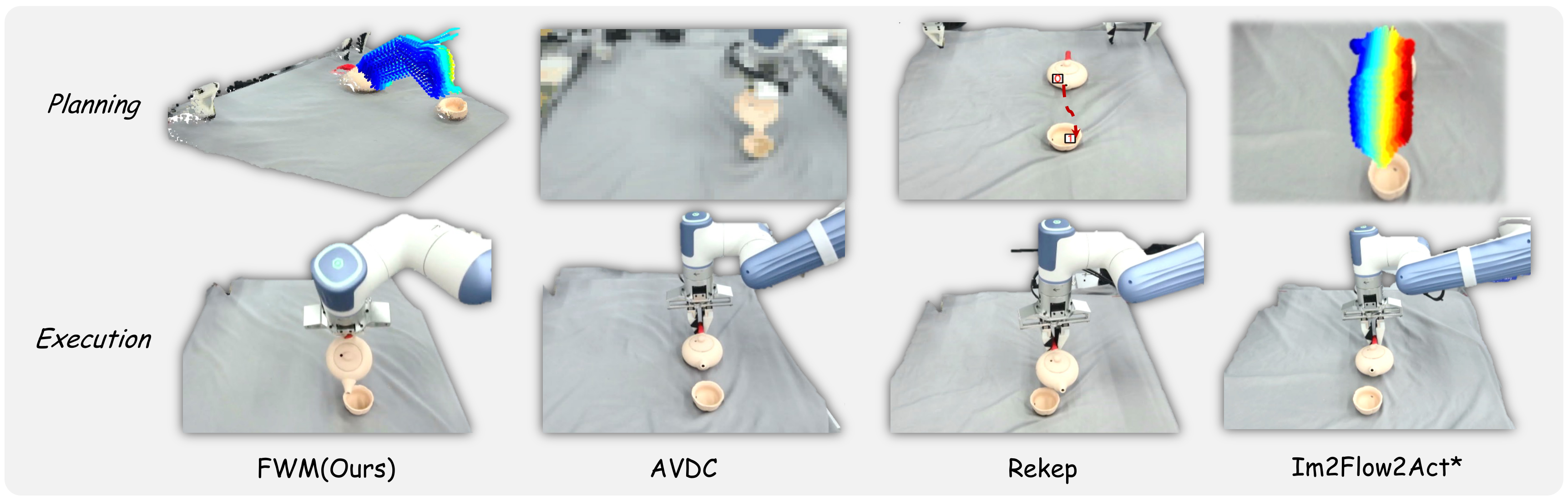
5.2 与 manipulation world models 比较
| Task | AVDC | ReKep | Im2Flow2Act* | 3DFlowAction |
|---|---|---|---|---|
| Pour tea from teapot to cup | 1/10 | 2/10 | 2/10 | 6/10 |
| Insert pen in holder | 2/10 | 1/10 | 2/10 | 7/10 |
| Hang cup to mug rack | 0/10 | 3/10 | 0/10 | 5/10 |
| Open top drawer | 5/10 | 2/10 | 6/10 | 10/10 |
| Total | 20.0% | 20.0% | 25.0% | 70.0% |
Im2Flow2Act* 是把原方法的 learnable action policy 替换为优化过程后的 2D flow 基线。3DFlowAction 全任务领先,说明 3D flow 对倒茶、插笔、挂杯这类涉及深度和旋转的任务更有表达力。
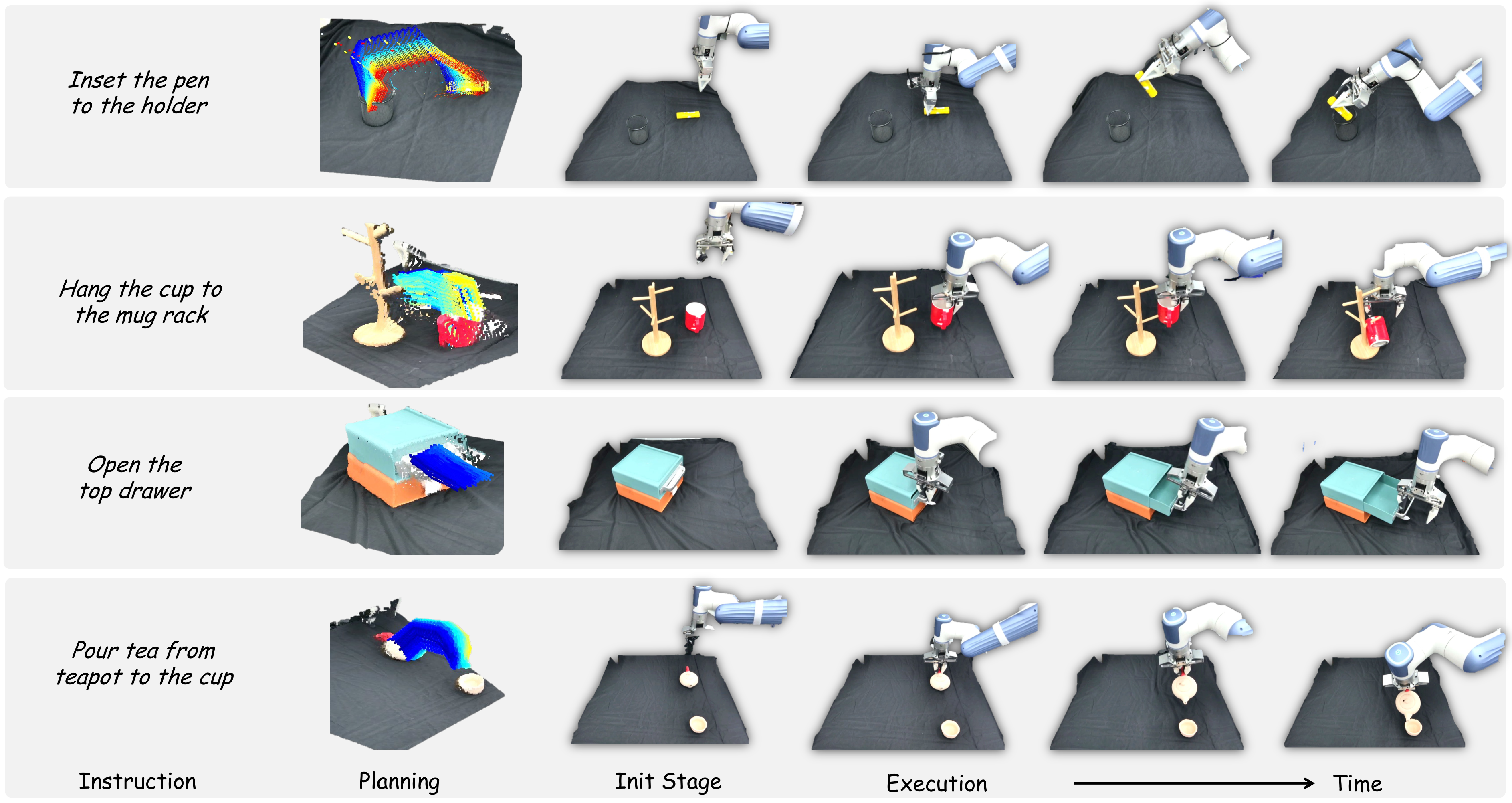
5.3 跨 embodiment 实验
| Task | Franka | XTrainer |
|---|---|---|
| Pour tea from teapot to cup | 7/10 | 6/10 |
| Insert pen in holder | 7/10 | 7/10 |
| Hang cup to mug rack | 4/10 | 5/10 |
| Open top drawer | 9/10 | 10/10 |
| Total | 67.5% | 70.0% |
作者强调该实验没有 robot-related fine-tuning。由于 3D flow 描述的是物体运动而不是机器人动作,理论上只要新机器人能通过 IK 和优化实现该物体运动,就可以跨平台执行。
5.4 与模仿学习方法比较
| Task | PI0 | Im2Flow2Act | 3DFlowAction |
|---|---|---|---|
| Pour tea from teapot to cup | 5/10 | 4/10 | 6/10 |
| Insert pen in holder | 5/10 | 2/10 | 7/10 |
| Hang cup to mug rack | 4/10 | 0/10 | 5/10 |
| Open top drawer | 6/10 | 5/10 | 10/10 |
| Total | 50.0% | 27.5% | 70.0% |
PI0 作为 VLA/flow action model 基线,表现不错但仍低于 3DFlowAction。这里的关键比较是:3DFlowAction 没有用机器人 teleoperation action labels,而 PI0/Im2Flow2Act 类方法需要动作数据或模拟数据。
5.5 OOD 物体与背景泛化
| Task | Object Generalization | Background Generalization | ||||
|---|---|---|---|---|---|---|
| AVDC | PI0 | 3DFlowAction | AVDC | PI0 | 3DFlowAction | |
| Pour tea | 0/10 | 3/10 | 4/10 | 0/10 | 4/10 | 4/10 |
| Insert pen | 2/10 | 6/10 | 6/10 | 0/10 | 1/10 | 4/10 |
| Hang cup | 0/10 | 2/10 | 4/10 | 0/10 | 3/10 | 4/10 |
| Open drawer | 4/10 | 5/10 | 8/10 | 0/10 | 5/10 | 8/10 |
| Total | 15.0% | 40.0% | 55.0% | 0.0% | 32.5% | 50.0% |
AVDC 在背景泛化中掉到 0,说明 RGB future state generation 受到背景变化干扰很大。3DFlowAction 虽然也下降,但保持 50% 左右,符合对象中心表示更抗背景变化的预期。
5.6 Ablation: 闭环规划与大规模预训练
| Method | Large-scale Pretrain | Rendering Machine | Success Rate | Pour tea | Insert pen | Hang cup | Open drawer |
|---|---|---|---|---|---|---|---|
| Variant 1 | Yes | No | 50.0% | 3/10 | 5/10 | 3/10 | 9/10 |
| Variant 2 | No | Yes | 30.0% | 3/10 | 3/10 | 2/10 | 4/10 |
| 3DFlowAction | Yes | Yes | 70.0% | 6/10 | 7/10 | 5/10 | 10/10 |
关闭 rendering machine 后平均下降 20 个点,说明 GPT-4o 验证和重新预测确实有用;去掉 ManiFlow-110k 大规模预训练后下降 40 个点,说明下游每任务 10 到 30 条人类示范不足以从零学到稳定 3D flow。
6. 复现要点
6.1 数据和标注流程
- 收集多源人类/机器人视频,包括 BridgeV2、RT1、AgiWorld、Libero、RH20T-Human、HOI4D、DROID。
- 用 Grounding-SAM2 识别 gripper 并过滤夹爪点。
- 用 CoTracker3 找运动点和提取 2D object flow。
- 用 DepthAnythingV2 把 2D flow 投影为 3D flow。
- 下游任务每个任务收集 10 到 30 条人类手部示范,论文主实验为每任务 30 条、约 10 分钟。
6.2 训练细节
| 参数 | 值 |
|---|---|
| Model base | AnimateDiff + Stable Diffusion v1.5 layers + motion module + LoRA |
| Training data | ManiFlow-110k |
| Learning rate | 0.0001 |
| Batch size | 512 |
| Epochs | 500 |
| Optimizer | AdamW |
| Weight decay | 0.01 |
| Epsilon | 1e-8 |
| Compute | 8x8 V100,约 2 天 |
6.3 优化过程
- 单臂机器人决策变量是 6D end-effector pose,包括位置和 Euler angles。
- 初次求解用 Dual Annealing 全局搜索,再用 SLSQP 局部优化。
- 后续迭代用上一阶段解初始化,只做局部优化以提高频率。
- 优化目标是让物体关键点到达 flow world model 预测的 3D 位置,同时考虑 IK 和碰撞检测。
fig_2025/*.pdf 图,并将 9 张论文图转换为可直接在 HTML 中打开的 PNG 图片。
7. 分析、局限与边界
7.1 这篇论文最有价值的地方
这篇论文最有价值的地方是把跨机器人动作学习的问题从“统一机器人动作空间”转成“统一物体 3D 运动空间”。3D flow 既比 RGB 视频更对象中心,又比 2D flow 更能表达深度和旋转,因此确实有潜力成为 human video、robot video 和不同硬件之间的共同接口。
第二个价值点是系统链路比较完整:数据构建、flow world model、闭环 flow 验证、抓取位姿选择和动作优化都连起来了。它不是只展示 flow 预测可视化,而是把 flow 用到真实机器人任务成功率上。
7.2 结果为什么站得住
- 主实验包含四个空间要求不同的任务:倒茶、插笔、挂杯、开抽屉,覆盖倾倒、旋转、对齐和拉动。
- 同时和 video world model、VLM code constraints、2D flow world model、VLA/模仿学习方法比较,不是只打单一基线。
- 跨平台 Franka 与 XTrainer 的成功率接近,支持 3D flow 作为 cross-embodiment 表示的主张。
- OOD 物体和背景实验显示对象中心 3D flow 比 RGB 视频生成更抗背景变化。
- Ablation 明确显示 rendering machine 和 large-scale pretraining 都对最终成功率有大幅贡献。
7.3 主要局限
- 非刚体和严重遮挡:作者明确指出柔性物体、强遮挡和复杂非刚体变形会让 3D optical flow 难以建模,进而导致 action policy 无法输出有效动作。
- 依赖深度估计质量:DepthAnythingV2 从单目视频估深,再投影成 3D flow;深度偏差会直接污染 3D 轨迹。
- 依赖 GPT-4o 验证:closed-loop rendering 用 GPT-4o 判断 predicted final state 是否符合任务,评估标准不完全透明,也会引入延迟和外部服务依赖。
- trial 数较少:每个任务 10 次,成功率差异虽大,但统计置信区间仍应谨慎。
- 优化 policy 仍需工程假设:IK、collision、workspace bounds、grasp candidate、rigid transform 等假设对真实任务很关键,不是纯学习模型端到端解决。
- 主要是单臂刚性物体操作:双臂协作、可变形物体、工具接触和长期闭环操作还未证明。
7.4 边界条件
| 适用条件 | 需要谨慎的条件 |
|---|---|
| 被操作对象可近似刚体,关键表面点可跟踪。 | 布料、绳子、液体、软体物体或强非刚体变形。 |
| 任务可通过物体目标位姿/轨迹表达。 | 任务依赖力控、触觉、隐状态或复杂接触模式。 |
| 单臂机器人可通过 IK 实现预测物体轨迹。 | 末端不可达、抓取点不稳定或需要重抓。 |
| 允许 GPT-4o 做计划验证和重新预测。 | 实时、安全关键、离线部署或不能调用外部 VLM 的系统。 |
8. 组会问答准备
Q1: 3DFlowAction 和 Im2Flow2Act 最大区别是什么?
Im2Flow2Act 主要使用 2D optical flow,无法完整表达深度方向移动和 3D 旋转;3DFlowAction 用 2D 坐标、深度和 visibility 组成 3D flow,并直接用该 3D flow 作为优化约束。
Q2: 为什么不用 RGB 视频 world model?
RGB 视频 world model 要生成背景、机器人外观和无关物体,计算量大且容易受 OOD 背景影响。3D flow 只关注被操作物体的运动轨迹,更对象中心,也更适合直接转成动作约束。
Q3: GPT-4o 在系统里做什么?
两处关键使用:一是 flow-guided rendering 后,判断预测最终状态是否符合任务,决定是否重新预测 flow;二是根据任务说明输出应该抓取的物体部位,辅助选择 task-aware grasp pose。
Q4: 方法为什么能跨 embodiment?
因为 world model 输出的是物体在 3D 空间中的运动,而不是某个机器人专属动作。不同机器人只需通过自己的 IK、workspace bounds 和优化器实现同一物体轨迹。
Q5: 最强证据是什么?
跨平台实验和 ablation 最关键:Franka 67.5%、XTrainer 70.0% 支持跨 embodiment;去掉大规模预训练从 70% 掉到 30%,说明 ManiFlow-110k 是核心支撑。
Q6: 最容易被质疑的地方是什么?
每任务只有 10 次 trial、依赖 GPT-4o、依赖单目深度和刚体/可跟踪物体假设。真实部署中,这些环节都可能成为失败来源。