WorldVLA: Towards Autoregressive Action World Model
1. 论文速览
| 论文要解决什么 | 现有 VLA 模型通常只把 action 当输出,缺少把 action 当输入来理解环境动态的能力;world model 能根据 action 预测未来视觉状态,但不能直接输出机器人动作。WorldVLA 试图统一这两类功能。 |
|---|---|
| 作者的方法抓手 | 把文本、图像和 7 维机器人动作都离散成 token,在一个 autoregressive LLM 中混合训练 action loss 与 world loss;并为 action chunk generation 设计只看文本和图像、不看先前 action token 的 attention mask。 |
| 最重要的结果 | 在 LIBERO 上,WorldVLA 512×512 无大规模机器人预训练时达到 81.8% 平均成功率,高于 OpenVLA 的 76.5%;action-world 联合训练相较单独 action model 平均 SR 从 62.8% 提到 67.2%,在带 action chunk 与新 mask 时从 76.6% 提到 78.1%。 |
| 阅读时要注意的点 | 论文没有附录,很多实现超参只在正文给出;表格中的 “WorldVLA” 有时指 action-world 联合训练,有时指 256/512 分辨率模型,需要结合表格列头区分。 |
关键词
Vision-Language-Action World Model Autoregressive Modeling Action Chunking LIBERO
核心贡献
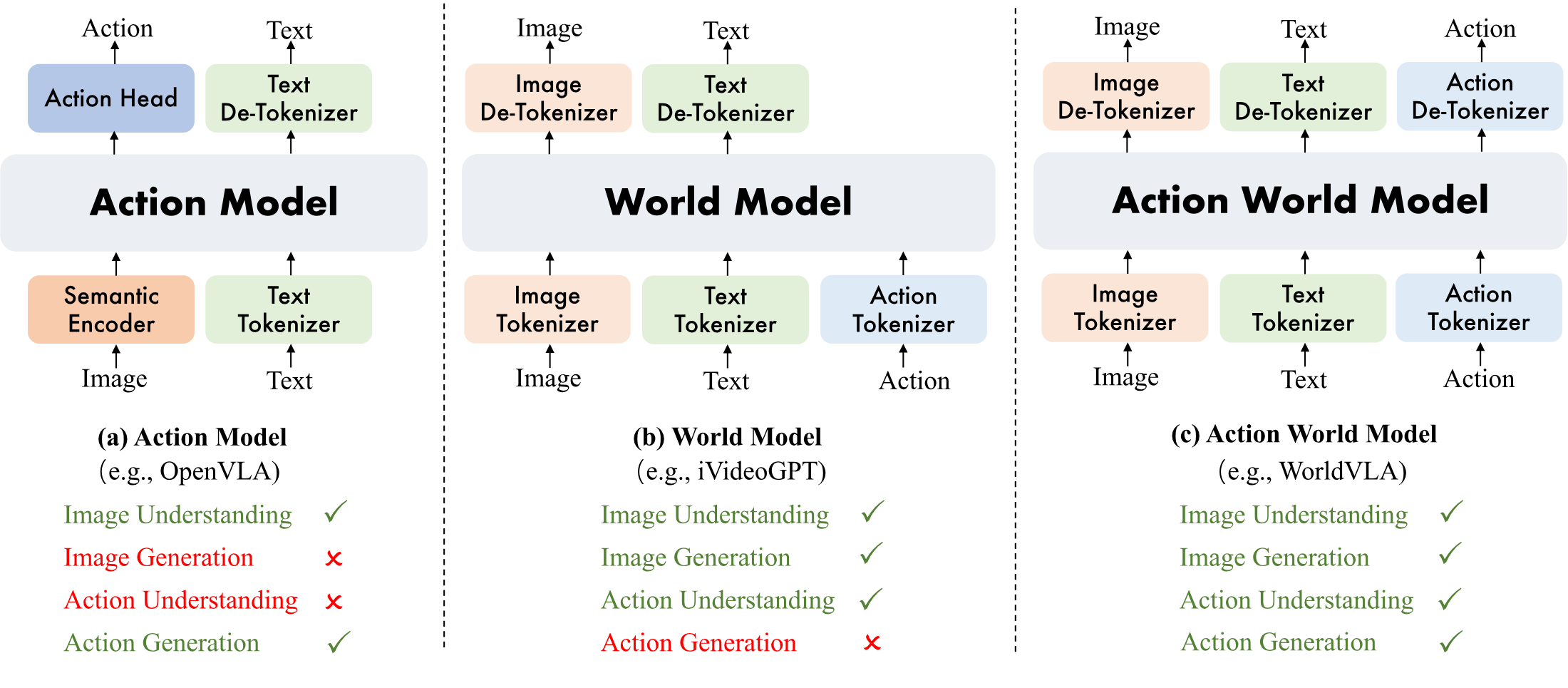
- 统一 action 与 image 的理解和生成。论文提出 WorldVLA,把 action model 与 world model 合成同一个自回归 action-world model。
- 指出离散自回归 action chunk 的误差传播问题。作者观察到普通 causal mask 下,后续动作会依赖前面已经生成的动作 token,前面错了会继续带偏后面。
- 提出 action attention mask。生成当前 action 时屏蔽历史 action token,让每个 action 主要由文本和视觉输入决定,从而减少 action chunk 长度增加时的性能下降。
- 实验证明双向增强。world model 训练改善 action success rate,action model 训练也改善长视频预测质量,尤其 50-frame FVD 从 718.6 降至 674.1。
2. 动机与相关工作
2.1 要解决的问题
论文把机器人模型分成两个互补但不完整的能力:VLA/action model 根据图像和语言输出动作,world model 根据当前视觉状态和动作预测未来视觉状态。前者能执行任务,但 action 多被看作最终输出;后者能建模动作导致的环境变化,却不能直接给出控制策略。
WorldVLA 的动机是:如果一个模型既要生成动作,又要根据动作想象下一帧,那么它在训练中会被迫同时学习视觉语义、动作语义和物理转移关系。作者将这称为 action model 与 world model 的 mutual enhancement。
2.2 相关工作脉络
| 技术线 | 代表方法 | 论文中的定位 | WorldVLA 的差异 |
|---|---|---|---|
| Vision-Language-Action Model | RT-1/RT-2, OpenVLA, $\pi_0$, diffusion VLA | 用 MLLM 或视觉 backbone 加 action head,把观测和指令映射到动作。 | 不仅预测 action,还把 action 作为输入去训练下一帧预测,使模型学习 action-conditioned dynamics。 |
| Video / World Model | MAGVIT, SVD, Cosmos, iVideoGPT, DWS | 视频生成可用于“想象未来”;world model 进一步用 action 控制未来状态。 | WorldVLA 同时保留 world prediction 与 action output,而不是只生成视频或只做策略选择。 |
| Unified Understanding and Generation | Chameleon, Emu3, Transfusion, Janus, UVA | 把理解与生成统一到同一模型或同一系统内。 | WorldVLA 选择离散 token + 自回归 LLM 路线;UVA 作为 action-world 方向的连续 diffusion head 对照。 |
2.3 方法类型对比表
| Model Type | Discrete | Continuous | Input | Output |
|---|---|---|---|---|
| Action Model | OpenVLA | $\pi_0$ | T + V | A |
| Video Prediction Model | MAGVIT | SVD | T + V | V |
| World Model | iVideoGPT | DWS | T + V + A | V |
| Action World Model | WorldVLA | UVA | T + V + A | V + A |
3. 方法详解
3.1 总体架构
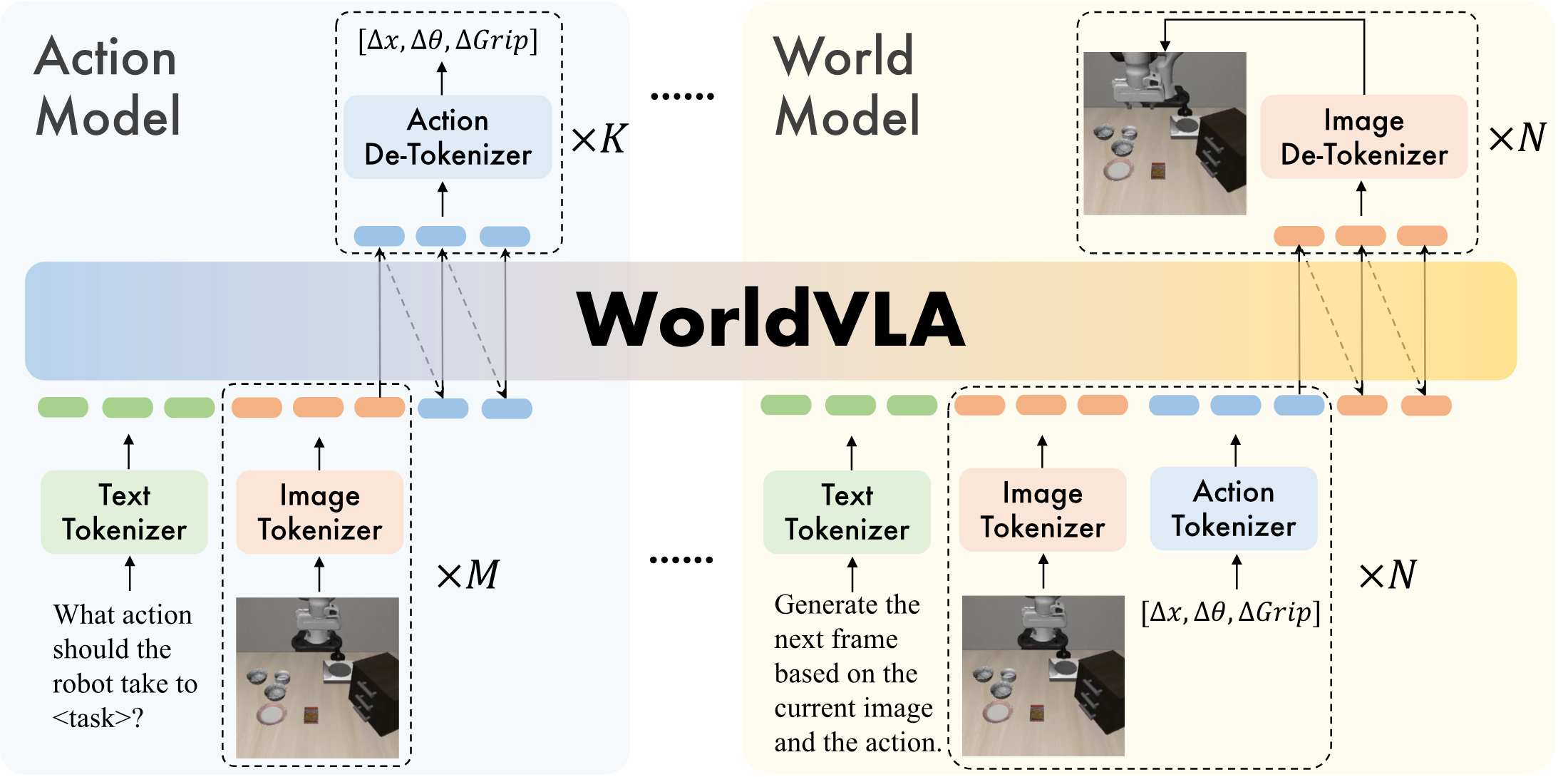
WorldVLA 初始化自 Chameleon,因为 Chameleon 本身就是图像理解和图像生成统一的离散 token 模型。论文在此基础上加入三类 tokenizer:image tokenizer、text tokenizer、action tokenizer。所有模态最终都进入同一个 autoregressive token 序列。
| 组件 | 论文给出的设置 | 作用 |
|---|---|---|
| Image tokenizer | VQ-GAN;压缩率 16;codebook size 8192;256×256 图像生成 256 tokens,512×512 图像生成 1024 tokens。 | 把图像离散化,使 LLM 能像生成文本 token 一样生成图像 token。 |
| Text tokenizer | BPE tokenizer;词表大小 65,536,其中包含 8192 image tokens 和 256 action tokens。 | 统一文本、图像、动作 token 的词表入口。 |
| Action tokenizer | 每个连续动作维度离散到 256 个 bin;一个动作表示为 7 个 token:3 个相对位置、3 个相对角度、1 个绝对夹爪状态。 | 把机器人控制量变成可由自回归模型预测的离散 token。 |
3.2 Action Model Data
action model 的任务是根据语言指令和图像观测生成动作。论文使用的文本 prompt 形式是:
序列形式为:
这里 $M$ 是输入历史图像数量,$K$ 是一次输出的 action chunk 长度。训练时只计算 action token 上的交叉熵损失 $\mathcal{L}_{action}$。
3.3 World Model Data
world model 的任务是根据当前图像和当前动作生成下一帧。论文强调它不需要 task instruction,因为给定 action 后,下一状态主要由当前状态和 action 决定。使用的文本 prompt 是:
$N$ 表示连续预测下一帧的轮数;论文默认为了节省计算设为 $N=1$。训练时只计算生成图像 token 的 loss。
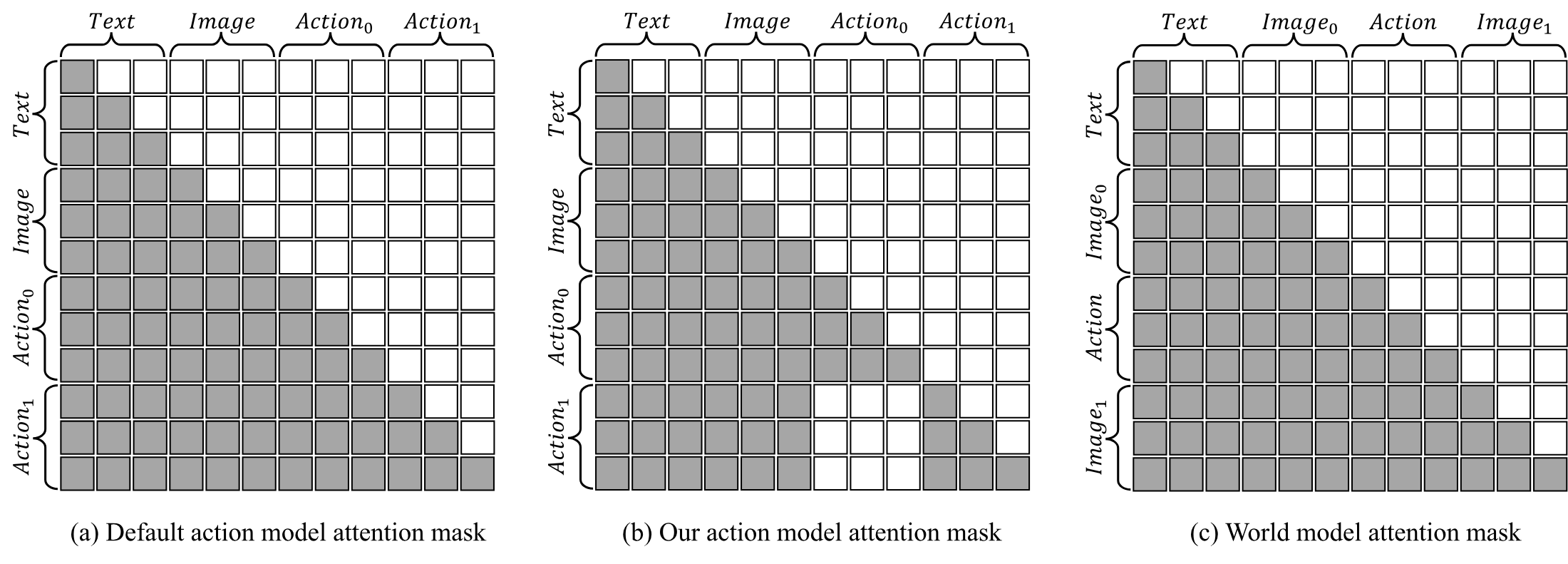
3.4 Action Attention Mask
普通自回归 causal mask 允许当前 token 看见所有过去 token。对文本和图像生成来说这很自然,但对 action chunk 来说会产生一个问题:后续 action token 会依赖前面预测出来的 action token。由于基础 MLLM 主要在文本和图像上预训练,action 模态泛化不如文本图像强,前面动作一旦预测错,错误会在 chunk 内传播。
作者提出的 mask 策略是:生成当前 action 时只允许看文本和图像输入,不允许看先前 action。这样 $K$ 个 action 在语义上更接近并行预测,每个动作都直接由视觉观测决定。
3.5 前向过程伪代码
4. 数学形式与训练目标
4.1 Problem Formulation
Action model 在回答:给定历史观测和语言指令,当前应该执行什么动作。
$$a_t = \pi_\theta(a_t \mid o_{t-h:t}, l)$$| $a_t$ | 时刻 $t$ 的机器人动作。 |
| $o_{t-h:t}$ | 从 $t-h$ 到 $t$ 的历史图像观测。 |
| $l$ | 自然语言任务指令。 |
| $\pi_\theta$ | 策略模型,也就是 action model。 |
World model 在回答:给定过去观测和过去动作,下一帧会是什么样。
$$o_t = f_\phi(o_t \mid o_{t-h:t-1}, a_{t-h:t-1})$$| $f_\phi$ | world model。 |
| $o_{t-h:t-1}$ | 当前帧之前的图像观测序列。 |
| $a_{t-h:t-1}$ | 对应的历史动作序列。 |
WorldVLA 把两种能力放进同一个参数化模型 $M_\psi$。
$$M_\psi: \begin{cases} a_t = M_\psi^{\text{policy}}(a_t \mid o_{t-h:t}, l), \\ o_t = M_\psi^{\text{world}}(o_t \mid o_{t-h:t-1}, a_{t-h:t-1}). \end{cases}$$这不是两个完全分离的模型,而是共享一个 autoregressive token backbone;区别主要来自输入序列格式、loss 位置和 attention mask。
4.2 Joint Loss
| $\mathcal{L}_{action}$ | action token 上的 cross-entropy loss。 |
| $\mathcal{L}_{world}$ | generated image token 上的 cross-entropy loss。 |
| $\alpha$ | world loss 权重,论文实验中固定为 0.04。 |
使用 $\alpha$ 的原因很实际:一个 action 只有 7 个 token,而图像有 256 或 1024 个 token;若不加权,world loss 的 token 数量会显著主导总损失。
5. 实验与结果
5.1 实验设置
| 项目 | 设置 |
|---|---|
| Benchmark | LIBERO,包括 LIBERO-Spatial、Object、Goal、Long、LIBERO-90。Spatial 测空间关系,Object 测物体识别和抓取放置,Goal 测不同目标过程,Long 包含 10 个长程任务,LIBERO-90 用于预训练。 |
| 数据处理 | 过滤失败轨迹和 no-operation actions;world model 评估需要成对 video/action ground truth,因此 90% trajectory 作为训练集,10% 作为验证集。Table 3 的 benchmark comparison 为公平使用所有可用数据训练。 |
| 默认超参 | action model 默认输入图像数 $M=2$;LIBERO Long 的 action chunk size $K=10$,其余三个任务 $K=5$;world model 默认 $N=1$;$\alpha=0.04$。 |
| Action metrics | 每个任务 50 次 rollout,记录 success rate,单位为百分比。 |
| World metrics | 在验证集上记录 FVD、PSNR、SSIM、LPIPS。 |
5.2 主 benchmark 结果
| Continuous Action Model | Pretraining | Spatial | Object | Goal | Long | Average |
|---|---|---|---|---|---|---|
| Diffusion Policy | No | 78.3 | 92.5 | 68.3 | 50.5 | 72.4 |
| Octo | Yes | 78.9 | 85.7 | 84.6 | 51.1 | 75.1 |
| DiT Policy | Yes | 84.2 | 96.3 | 85.4 | 63.8 | 82.4 |
| OpenVLA-OFT | Yes | 96.9 | 98.1 | 95.5 | 91.1 | 95.4 |
| Discrete Action Model | Pretraining | Spatial | Object | Goal | Long | Average |
| OpenVLA | Yes | 84.7 | 88.4 | 79.2 | 53.7 | 76.5 |
| WorldVLA 256×256 | No | 85.6 | 89.0 | 82.6 | 59.0 | 79.1 |
| WorldVLA 512×512 | No | 87.6 | 96.2 | 83.4 | 60.0 | 81.8 |
作者的解读是:WorldVLA 在没有大规模机器人预训练的条件下已经超过离散 OpenVLA。512×512 优于 256×256,一方面因为 Chameleon 的 image tokenizer 和 LLM 组件更贴近 512×512 预训练设置,另一方面高分辨率提供更细致的视觉信息,对抓取任务重要。
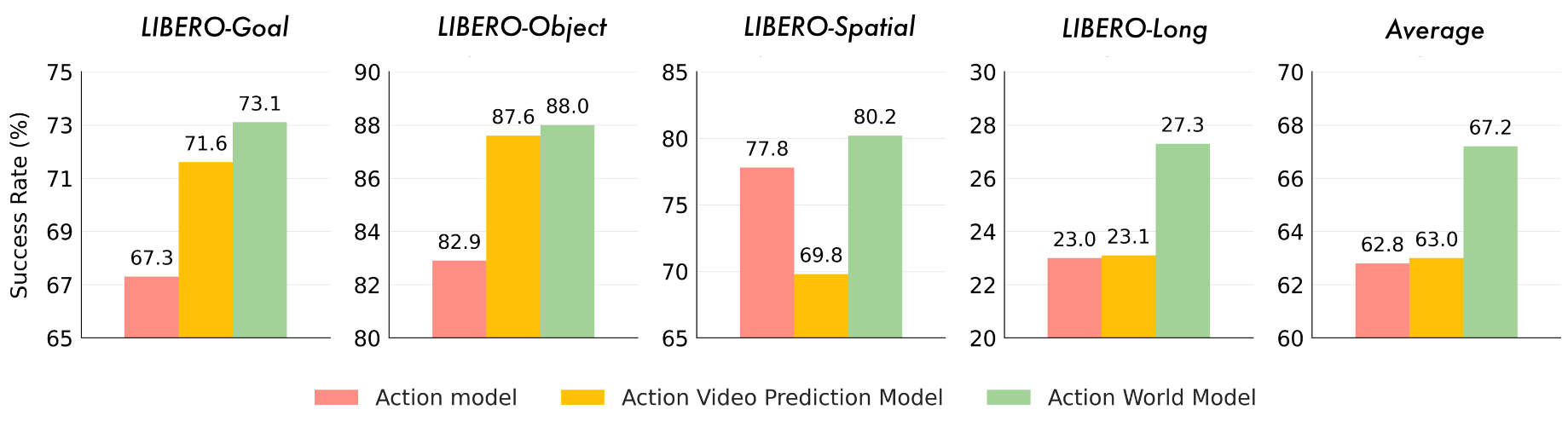
5.3 World Model 对 Action Model 的帮助
| Index | Action Model | World Model | Action Chunking | New Mask | Goal | Object | Spatial | Long | Average |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Yes | No | No | No | 67.3 | 82.9 | 77.8 | 23.0 | 62.8 |
| 2 | Yes | Yes | No | No | 73.1 | 88.0 | 80.2 | 27.3 | 67.2 |
| 3 | Yes | No | Yes | No | 79.6 | 82.9 | 36.7 | 16.9 | 54.0 |
| 4 | Yes | No | Yes | Yes | 84.4 | 90.9 | 81.8 | 49.3 | 76.6 |
| 5 | Yes | Yes | Yes | Yes | 85.1 | 90.9 | 84.0 | 52.4 | 78.1 |
Row 2 相比 Row 1 平均成功率从 62.8 提到 67.2;Row 5 相比 Row 4 从 76.6 提到 78.1。论文解释为:world model 需要学习动作导致的状态变化,因此会让共享 backbone 更理解环境物理和动作含义,从而对 action model 有益。
5.4 Action Model 对 World Model 的帮助
| 10 frames | 50 frames | |||||||
|---|---|---|---|---|---|---|---|---|
| Model | FVD ↓ | PSNR ↑ | SSIM ↑ | LPIPS ↓ | FVD ↓ | PSNR ↑ | SSIM ↑ | LPIPS ↓ |
| World Model | 250.0 | 29.62 | 90.73 | 11.97 | 718.6 | 23.98 | 83.41 | 15.60 |
| Action World Model | 255.1 | 29.77 | 90.40 | 11.94 | 674.1 | 24.30 | 83.55 | 15.44 |
10-frame 上两者接近,pure world model 的 FVD 与 SSIM 略好;50-frame 上 action world model 在四个指标上全部更好。作者据此强调:action generation 训练也能强化视觉和行为模式理解,尤其对较长序列生成更明显。
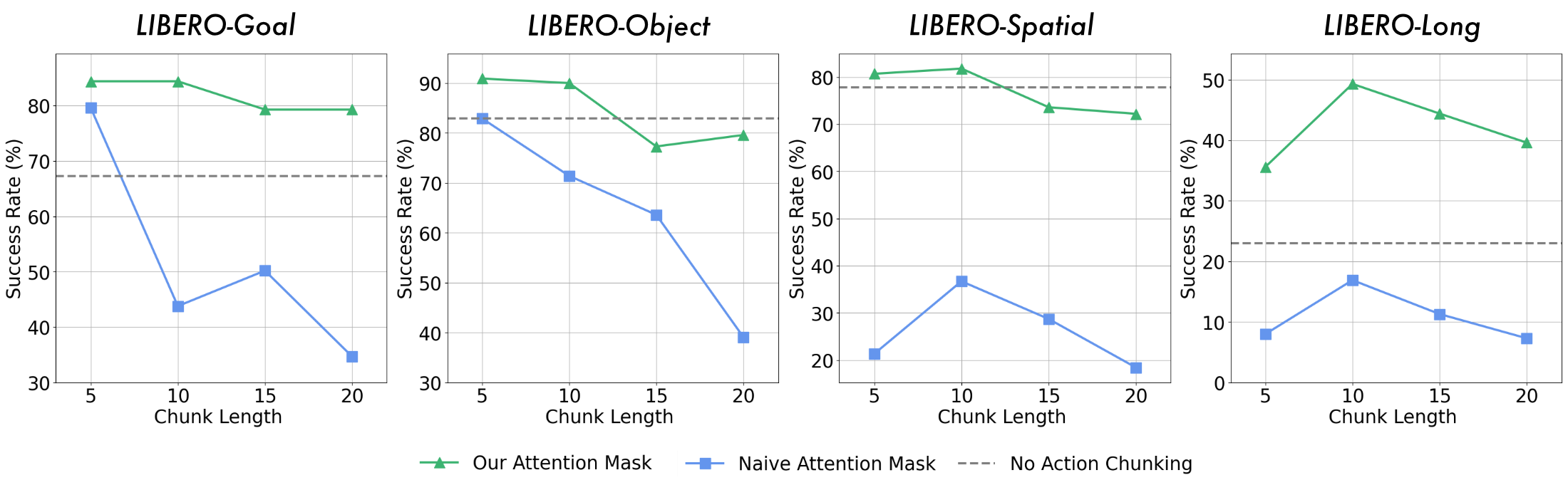
5.5 Action Chunking 与 Attention Mask
论文观察到,普通自回归方式生成多个连续动作时,action chunk 越长,性能越容易下降。原因是后续动作过度依赖前面已生成动作,而不是直接扎根于视觉输入。新 mask 让每个 action 只依赖文本和图像,避免 chunk 内错误传播。
5.6 World Model vs. Video Prediction Model
video prediction model 的输入是当前帧和 task instruction,不含 action;world model 的输入包含 action。作者比较两者对 action model 的帮助,发现 world model 对所有评估任务都有提升,而 video prediction model 只在两个任务上有帮助、一个任务上有负面影响。论文给出的解释是:没有 action 条件时,同一初始帧可能对应多个合理未来帧,训练信号更模糊;action-conditioned world model 的未来状态更确定。
5.7 历史图像输入长度
| 1 frame | 2 frames | 4 frames | ||||
|---|---|---|---|---|---|---|
| Setting | SR ↑ | FPS ↑ | SR ↑ | FPS ↑ | SR ↑ | FPS ↑ |
| w/o Action Chunking | 58.4 | 2.27 | 67.3 | 1.77 | 78.7 | 1.22 |
| w/ Action Chunking | 74.0 | 3.67 | 84.4 | 3.13 | 84.7 | 2.78 |
历史帧越多,模型获得的视觉上下文越强,但 FPS 下降。带 action chunking 时,2 帧到 4 帧的 SR 只从 84.4 到 84.7,作者因此默认采用 $M=2$,作为性能和速度折中。
5.8 World Model Pretraining
| Setting | Goal | Object | Spatial | Long | Average |
|---|---|---|---|---|---|
| w/o World Model Pretrain | 67.3 | 82.9 | 77.8 | 23.0 | 62.8 |
| w/ World Model Pretrain | 73.1 | 84.0 | 79.8 | 30.2 | 66.8 |
world model pretraining 后平均 SR 从 62.8 到 66.8,Long 从 23.0 到 30.2。作者将其解释为:world model 预训练迫使模型先学习视觉输入、动作以及状态转移物理,再迁移到 action model。
6. 复现审计
6.1 代码与模型
可用信息:arXiv 页面和源码都给出 GitHub 链接 alibaba-damo-academy/WorldVLA。当前该链接会重定向到 RynnVLA-002,README 显示 2025-11-10 将 WorldVLA 升级为 RynnVLA-002,并在 2025-06-23 发布过 WorldVLA 的模型、训练代码和 LIBERO 评测代码。Hugging Face 上仍有 WorldVLA model card,列出了 256 和 512 分辨率 checkpoint。
6.2 数据与预处理
- 使用 LIBERO benchmark,主要评估 Spatial、Object、Goal、Long,并使用 LIBERO-90 作为预训练相关数据来源。
- 过滤 unsuccessful trajectories 和 no-op actions,处理方式参照 OpenVLA。
- world model 评估需要 ground-truth paired video/action data,因此训练/验证按 90%/10% 轨迹划分。
- Table 3 的主 benchmark comparison 使用所有可用数据训练,以便和前作对比。
6.3 训练关键超参
| 超参 | 值 | 备注 |
|---|---|---|
| Backbone initialization | Chameleon | 统一图像理解和生成的离散自回归模型。 |
| Image resolution | 256×256 或 512×512 | 512×512 图像对应 1024 image tokens,性能更高但代价更大。 |
| Image tokenizer codebook | 8192 | VQ-GAN tokenizer。 |
| Text tokenizer vocabulary | 65,536 | 包含 image/action token。 |
| Action bins | 每个维度 256 bins | 由训练数据范围决定 bin width。 |
| Action dimension | 7 tokens | 3 relative positions + 3 relative angles + 1 gripper state。 |
| Historical images $M$ | 默认 2 | 由历史帧消融确定。 |
| Action chunk $K$ | Long 为 10,其余为 5 | 默认配置。 |
| World prediction rounds $N$ | 1 | 为节省计算。 |
| Loss weight $\alpha$ | 0.04 | 平衡 image token 数量远多于 action token 的问题。 |
6.4 复现缺口
- 训练资源未在论文正文说明。GPU 类型、数量、训练时长、batch size、optimizer、learning rate schedule 等不在 LaTeX 正文中。
- 没有附录。源码中 appendix 输入被注释,未提供更完整的超参表或实现细节补充。
- 代码仓库已经升级。论文给出的 WorldVLA GitHub 链接当前重定向到 RynnVLA-002;若严格复现论文表格,需要确认仓库是否保留原 WorldVLA 版本或对应 tag/commit。
7. 分析、局限与边界
7.1 这篇论文最有价值的地方
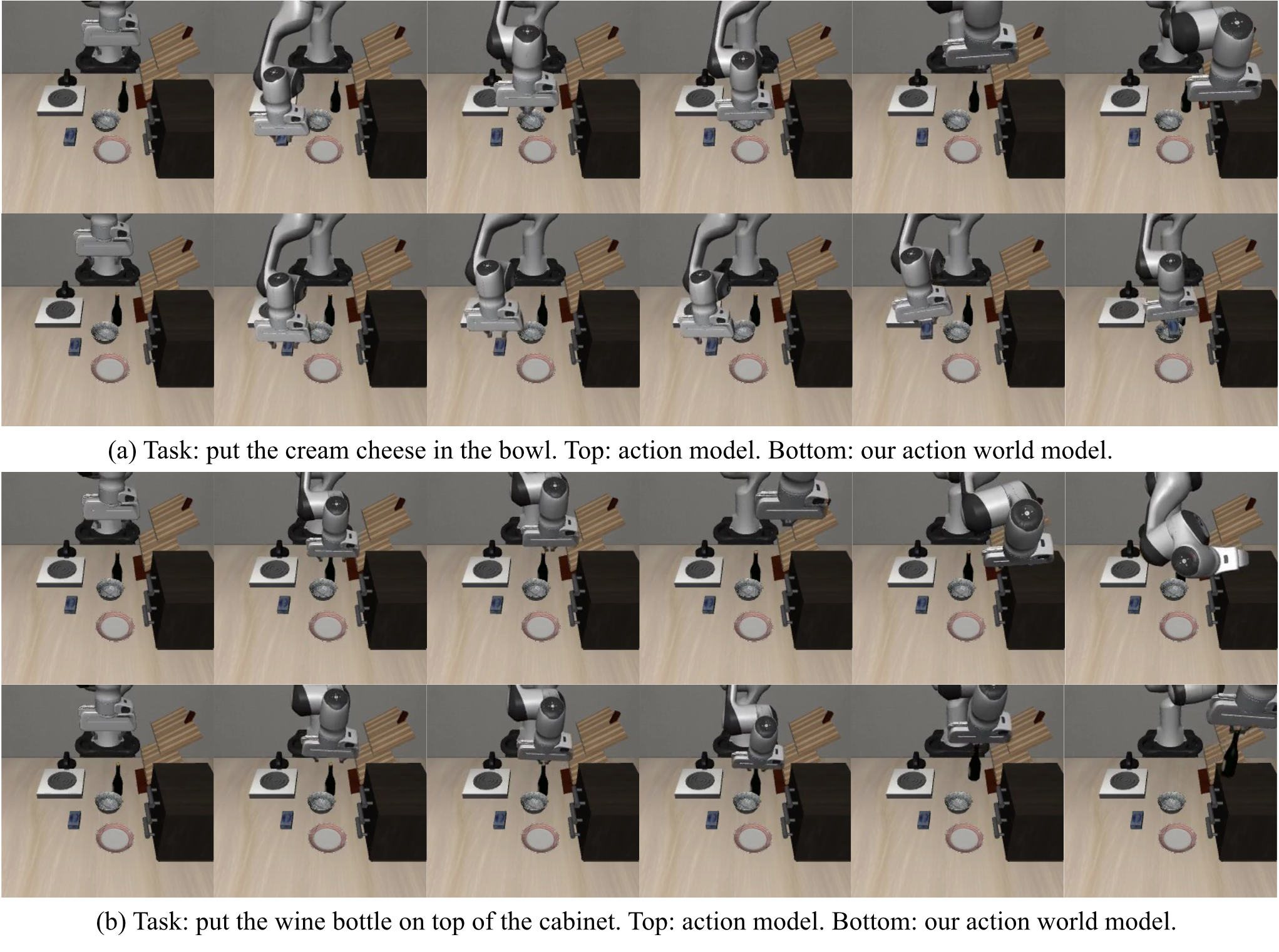
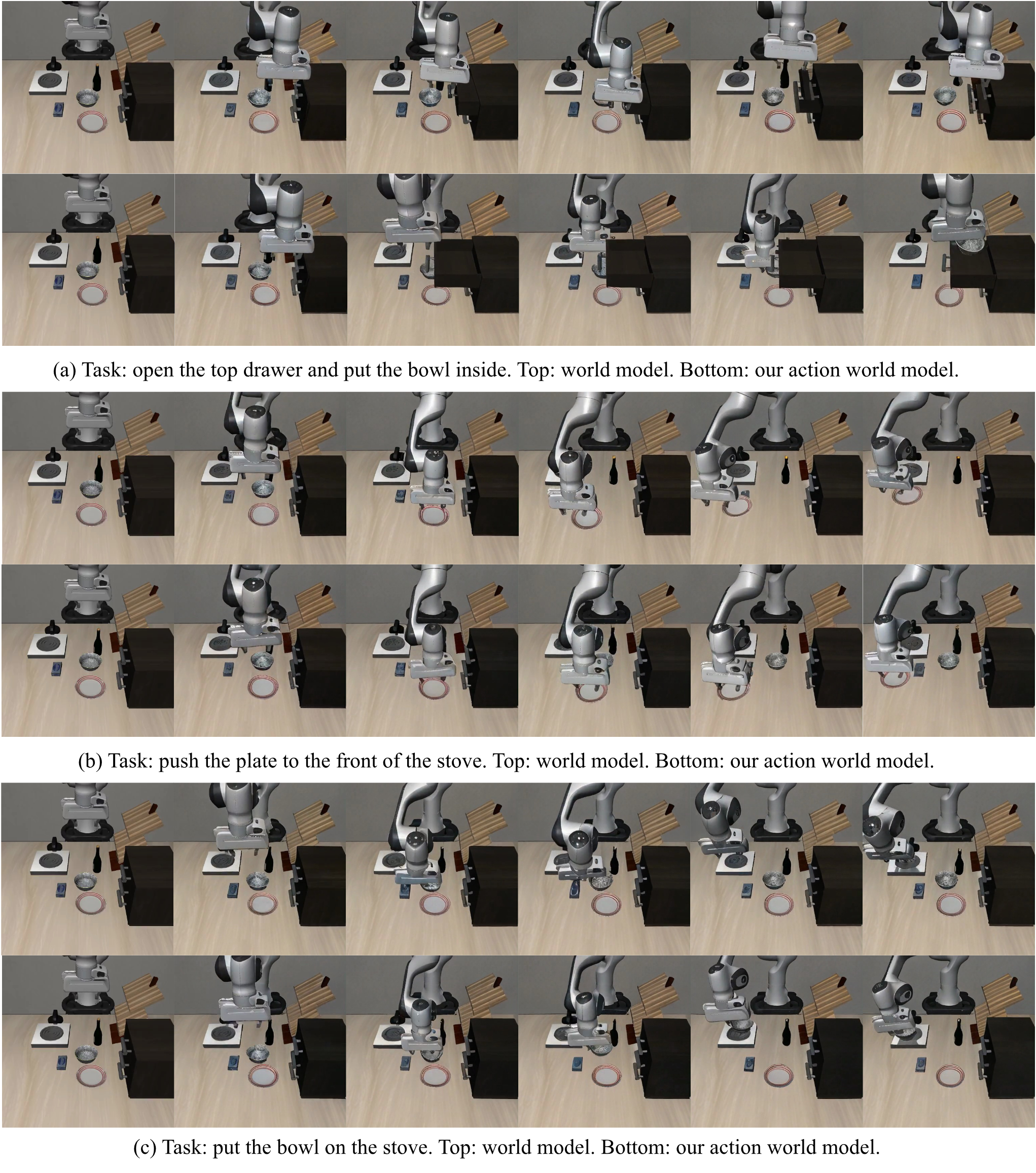
从论文自身证据看,价值集中在两个相互连接的结论:第一,world model 训练能改善 action generation;第二,action model 训练也能改善较长 horizon 的 world prediction。这个结论不是只靠概念图支撑,而是分别由 action ablation 表、world model ablation 表和可视化案例给出支持。
7.2 结果为什么站得住
论文的主张有三类证据互相对齐:主 benchmark 显示 WorldVLA 在离散 action model 组超过 OpenVLA;ablation 明确拆分 action model、world model、action chunking、attention mask 的影响;可视化图展示了纯 action model 和纯 world model 的典型失败模式。尤其 Table 4 的 Row 3 与 Row 4 直接说明 naive autoregressive action chunk 会大幅退化,而新 mask 能恢复性能。
7.3 作者自述的局限与未来方向
- 数据和模型规模仍可扩展。Conclusion 中明确把 scaling data and model size 作为后续方向。
- 离散 image tokenizer 的视觉表达能力有限。作者指出当前 tokenizer 依赖离散表征,perceptual expressiveness 受限,需要更统一、更高质量的 tokenizer。
- 可以加入辅助 action head。作者认为 auxiliary action head 可能进一步提升 grasping performance。
7.4 适用边界
论文的实验证据主要来自 LIBERO 仿真 benchmark;模型是否能直接迁移到真实机器人、更多硬件动作空间、更长任务链条和更复杂交互环境,正文没有给出实验验证。报告中关于泛化的结论因此只限于论文已评估的 LIBERO 设置。
7.5 附录状态
本 arXiv 源码未包含可用附录:`paper.tex` 中 `\beginappendix` 与 `\input{sec/appendix}` 均被注释,源码目录也没有 `sec/appendix.tex`。因此本报告没有可整合的附录证明、附录超参或附录补充实验。