Vidar: Embodied Video Diffusion Model for Generalist Manipulation
1. 论文速览
| 论文要解决什么 | 新机器人平台上,双臂操作需要大量与硬件绑定的示范数据;不同机器人动作空间、视角和形态差异又让跨平台迁移很难。论文想回答:能否把互联网上和机器人数据中的视频动态知识变成可迁移先验,让一个未见过的双臂平台只用约 20 分钟示范也能执行多任务操作? |
|---|---|
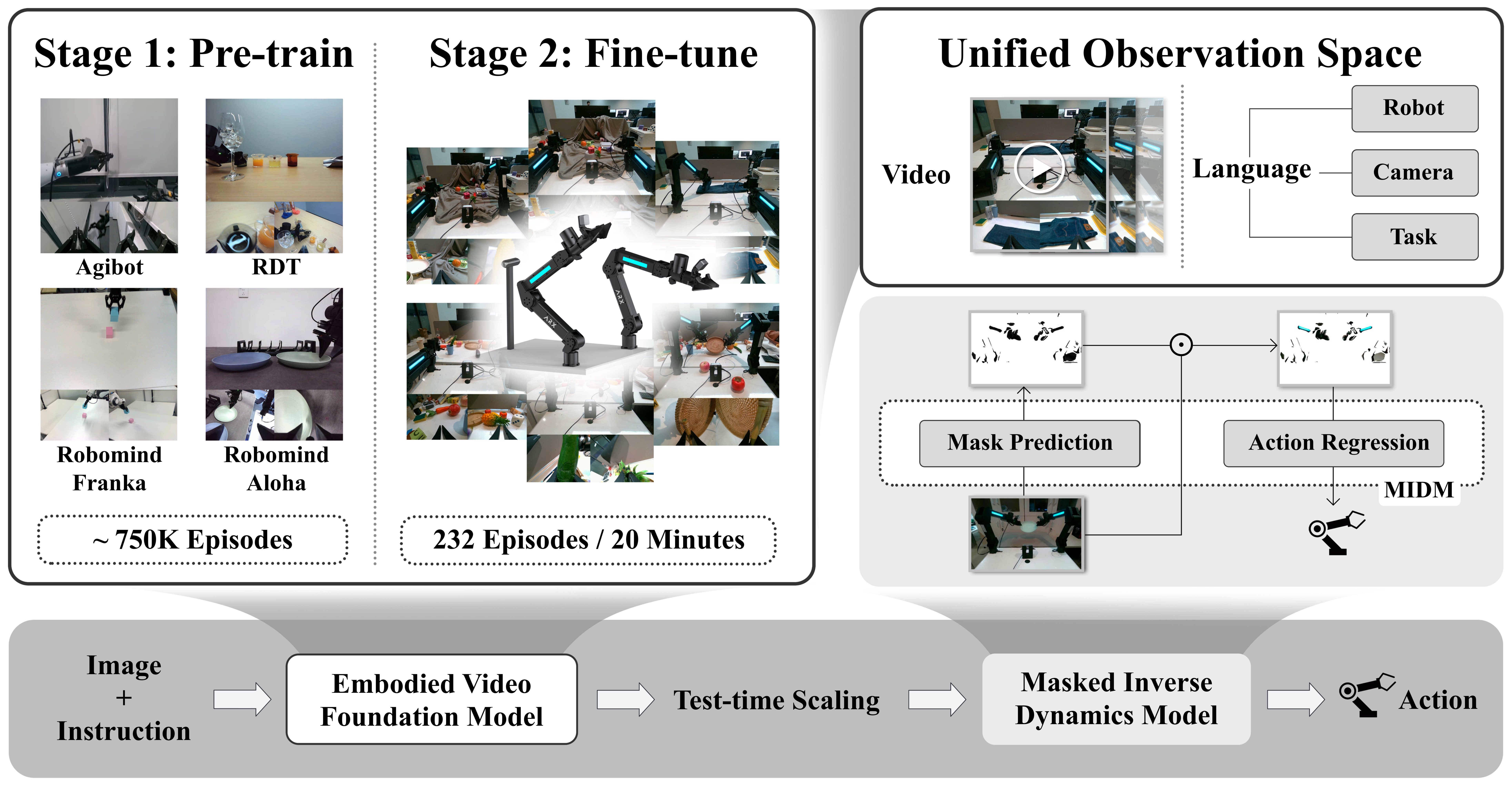
| 作者的方法抓手 | 把策略分解成两步:先用视频扩散模型生成“接下来应该发生什么”的多视角视频 rollout,再用 Masked Inverse Dynamics Model, MIDM, 把视频帧转成目标机器人动作。关键抓手是统一观察空间、750K 多视角双臂视频的 embodied pre-training、少量目标平台全参数微调、测试时多采样重排,以及无像素标注的动作相关区域 mask。 |
| 最重要的结果 | RoboTwin 2.0 多任务设置中,Vidar 在 low data clean 场景达到 60.0% 平均成功率,而 Pi0.5 为 25.0%;standard clean 为 65.8%,Pi0.5 为 44.8%。真实平台上,仅约 20 分钟、232 个 episode 的人类示范,Vidar 在 seen tasks/backgrounds、unseen tasks、unseen backgrounds 上分别达到 68.2%、66.7%、55.6%,显著高于 UniPi 和 VPP。 |
| 阅读时要注意的点 | 这篇论文的重点不只是“视频生成好看”,而是视频是否足够 action-aware。要特别看三处:统一观察空间是否真的缓解 embodiment gap;MIDM 的 mask 是否只是在真实平台分布上有效;TTS 依赖 GPT-4o 重排和云端视频模型,带来延迟、成本和闭环控制缺失。另一个边界是作者强依赖多视角能看到手臂与接触区域。 |
2. 动机与问题定义
2.1 为什么不是直接训练 VLA 策略
作者认为双臂操作的难点来自三个耦合因素:动作空间随关节数量膨胀,双臂之间需要精确时间协调,接触动态和长时序规划对数据质量很敏感。VLA 模型虽然可以把视觉、语言和动作端到端连接起来,但动作空间高度依赖机器人形态,跨平台时很难把一个平台的动作标签直接迁移到另一个平台。
因此 Vidar 选择绕开动作空间的异构性:视频扩散模型只学习世界如何演化,不直接学习动作;动作只在目标平台上由轻量逆动力学模型解码。这是论文的基本立场:视频是介于互联网数据、机器人数据和目标平台示范之间的中间模态。
2.2 形式化问题
原始目标是学习条件操作策略:
其中 $\mathcal{L}$ 是语言指令空间,$\mathcal{O}$ 是观察空间,$\mathcal{A}$ 是动作空间。作者将其分解为视频生成模型 $G$ 和逆动力学模型 $I$:
这意味着大部分跨任务、跨场景的知识由 $G$ 承担;目标机器人相关的动作映射由 $I$ 承担。读这篇论文时要一直问:视频空间是否真的保留了足够动作信息?如果某些关节或接触点不在视野里,$I$ 就无法可靠恢复动作。
2.3 贡献定位
- 提出用大规模视频扩散模型作为双臂操作的 transferable prior,并通过 embodied pre-training 把互联网视频先验适配到机器人视频域。
- 提出统一观察空间,把机器人类型、相机布局、任务语言和多视角帧拼接到统一输入格式,降低多平台数据的视角和形态差异。
- 提出 MIDM,用无像素级监督的 mask 让逆动力学模型关注手臂、工具和接触区域,从而提升背景变化下的动作解码泛化。
- 在 RoboTwin 和真实 Aloha 双臂平台上展示低样本适配,尤其强调真实平台只用约 20 分钟示范。
4. 方法详解
4.1 三阶段训练管线
Vidar 的训练从大到小分三层数据:
- 互联网规模视频预训练:直接采用已有视频模型 checkpoint,例如 Wan2.2、Vidu 2.0、HunyuanVideo,获得语义、运动和物理交互先验。
- embodied domain pre-training:用约 750K 多视角双臂机器人 episode 继续预训练,让视频模型适配机器人、相机和操作动态。
- 目标平台 fine-tuning:用目标机器人少量示范做全参数 SFT,同时训练 MIDM 把视频帧映射到动作。
4.2 视频生成模型:rectified flow
作者采用 rectified flow 形式的视频扩散模型。模型学习速度场 $v(x_t,t,c)$,从高斯噪声 $x_0$ 流向目标视频 $x_1$:
训练时让速度场逼近从 $x_0$ 到 $x_1$ 的常量流:
这里的 $c$ 不是只有任务文本,而是统一观察空间里的机器人、相机、任务和多视角图像上下文。这个选择是 Vidar 区别于普通 text-to-video 控制方法的关键。
4.3 统一观察空间
统一观察空间定义为:
其中 $\mathbf{o}$ 是多视角图像聚合,$l_r,l_c,l_t$ 分别描述机器人平台、相机配置和任务指令。对不同数据集,作者给出类似 “fixed high camera, movable left arm camera, movable right arm camera” 的文本描述,作为条件的一部分。
这一步的好处是让模型不需要统一动作空间,只要把不同机器人平台的视频都投到同一种“多视角图像加描述”的格式里。但这也带来一个隐含要求:相机描述要足够稳定且视角能覆盖动作相关区域。
4.4 embodied pre-training 与目标平台微调
预训练数据来自 Agibot-World、RoboMind、RDT,真实实验对应的数据规模为 746,533 episodes;仿真实验额外加入 Egodex。作者过滤掉少于三视角或短于四秒的 episode,并用 Agibot 的 frame-level annotation 把长 episode 切成短 clips。预训练时按数据集大小比例采样。
目标平台的数据既用于 fine-tune 视频扩散模型,也用于训练 MIDM。真实平台数据为 20 分钟人类示范,覆盖 81 个任务、232 个 episodes;仿真 low data 设置为 RoboTwin 每任务 20 episodes,standard 设置为每任务 50 episodes。
4.5 Test-Time Scaling
视频扩散模型的采样有随机性,单次 rollout 可能物理不一致或任务不匹配。Vidar 在推理时生成 $K$ 个候选视频:
然后用 evaluator $q_\eta$ 选择最高分视频:
真实实验中 $K=3$,三条视频并行生成,再由 GPT-4o 依据物理合理性和任务文本一致性重排;仿真实验中为可复现性关闭 TTS,即 $K=1$。附录说明每次 pairwise comparison 约 0.003 美元,$K=3$ 时 GPT-4o 重排约占总延迟的 25%。
4.6 Masked Inverse Dynamics Model
MIDM 包含两个网络:mask prediction network $U$ 和 action regression network $R$。给定帧 $x$,先预测空间 mask:
训练损失为:
其中 $l$ 是 Huber loss,$\lambda\|m\|_1$ 鼓励 mask 稀疏,Round 通过 straight-through estimator 训练。直觉是:如果模型必须用尽量少的像素预测动作,它会倾向保留手臂、夹爪、工具和接触点,过滤背景与反光干扰。
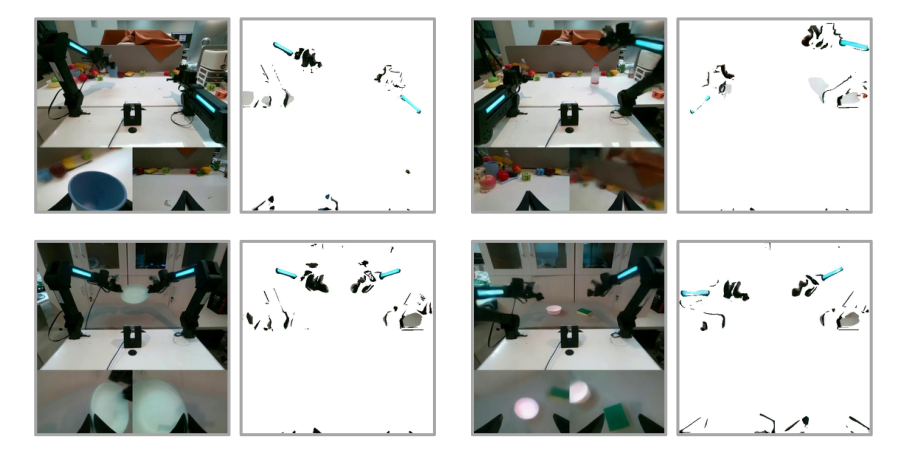
4.7 为什么不用现成分割模型
附录测试了 RoboEngine 分割。作者指出它在双臂场景中经常只识别一只手臂,腕部视角下不稳定,也缺少时间一致性。因此 Vidar 不依赖外部分割标签,而是让动作监督反向塑造 mask。

5. 实验与结果
5.1 实验假设
- Vidar 只用 20 分钟目标域示范也能获得更高成功率。
- Vidar 能泛化到未见任务和未见背景。
- 统一观察空间上的 embodied pre-training 能提升视频生成质量。
- MIDM 比普通 ResNet 逆动力学模型更能泛化。
5.2 数据与训练设置
| 项目 | 设置 |
|---|---|
| 预训练数据 | Agibot-World、RoboMind、RDT;真实实验共 746,533 episodes;仿真实验额外加入 Egodex。 |
| 目标真实平台数据 | 20 分钟人类示范,81 个任务,232 episodes;目标平台在预训练中未见。 |
| 仿真数据 | RoboTwin 2.0;low data 为每任务 20 episodes 且调整相机以完整看到手臂;standard 为每任务 50 episodes、官方视角。 |
| 视频模型 | 仿真使用 Wan2.2;真实主实验使用 Vidu 2.0;附录还复现 Wan2.2 和 HunyuanVideo。 |
| 训练步数 | Wan2.2: 10K pre-training + 12K fine-tuning;Vidu 2.0: 10K pre-training + 13K fine-tuning;视频降采样到 8 fps。 |
| MIDM | U-Net mask predictor + ResNet-50 action regressor;$\lambda=3\times10^{-3}$;仅用 fine-tuning dataset 训练。 |
5.3 RoboTwin 2.0 主结果
RoboTwin 结果使用更难的多任务设置:不是每个任务单独训练一个策略,而是 50 个任务平均评估,每个任务 100 episodes。表中 Pi0* 是官方 leaderboard 结果,因为其每任务独立训练,作者说明更容易且不完全可比。
| 方法 | Low Clean | Low Randomized | Standard Clean | Standard Randomized |
|---|---|---|---|---|
| Pi0* | - | - | 46.42% | 16.34% |
| Pi0.5 | 25.0% | 9.2% | 44.8% | 14.2% |
| Vidar | 60.0% | 15.7% | 65.8% | 17.5% |
关键解读:Vidar 在 clean 场景提升最大,说明视频先验和多视角条件对任务执行很有帮助;randomized 场景提升较小,说明背景和物体随机化仍然是瓶颈,但 Vidar 仍超过 Pi0.5。
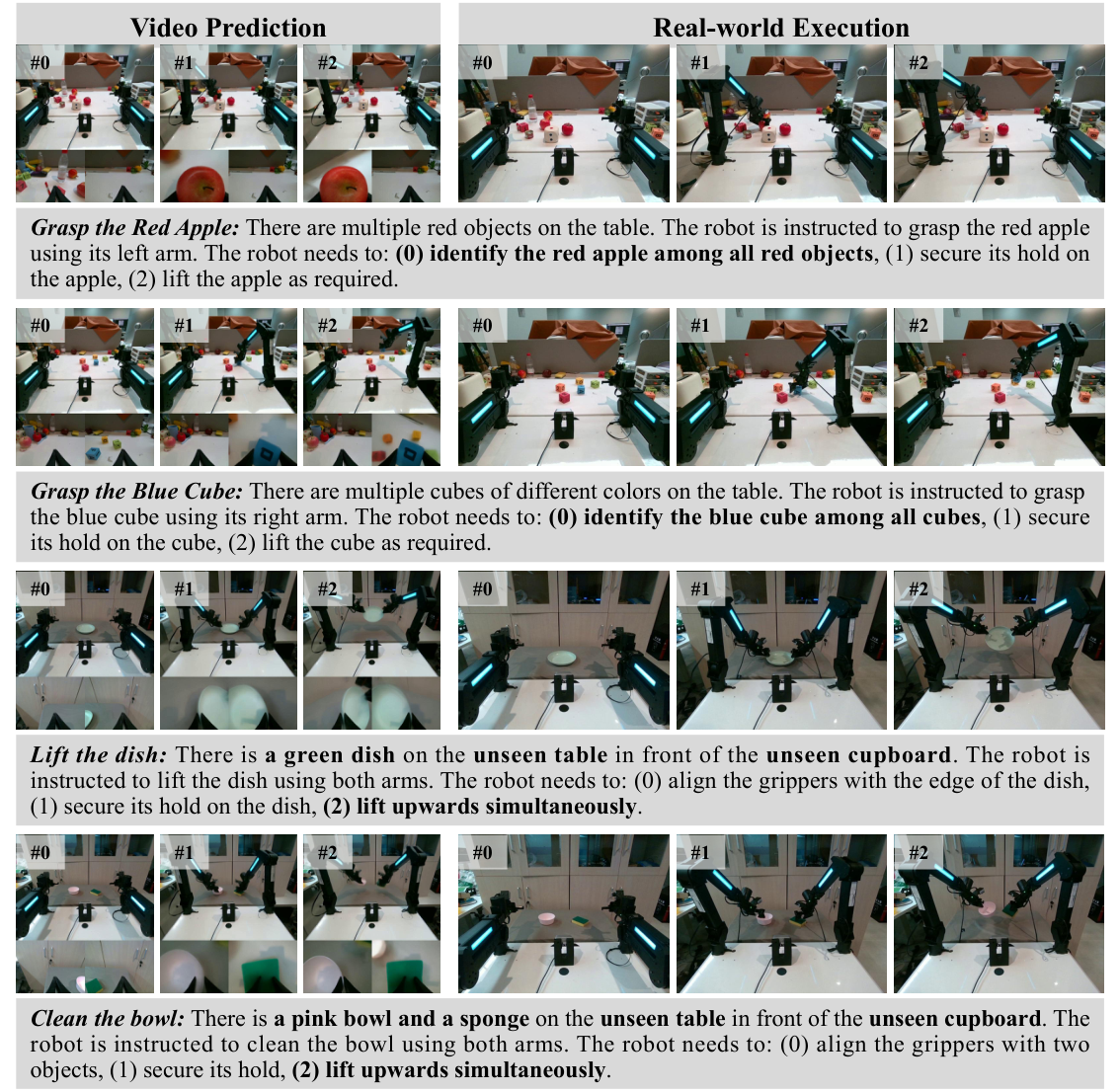
5.4 真实机器人主结果
真实实验分为 seen tasks/backgrounds、unseen tasks、unseen backgrounds 三类。基线选 UniPi 和 VPP,因为作者认为只有 20 分钟数据时,常规 VLA 很难有效适配。
| 方法 | Seen Tasks & Backgrounds | Unseen Tasks | Unseen Backgrounds |
|---|---|---|---|
| VPP | 4.5% | 13.3% | 0.0% |
| UniPi | 36.4% | 6.7% | 22.2% |
| Vidar | 68.2% | 66.7% | 55.6% |
这里最强的证据是 unseen tasks 仍有 66.7%,说明视频模型不仅记住示范任务,还能利用语言和视频先验处理语义任务,例如抓最短的面包、用抹布擦桌子等。unseen backgrounds 降到 55.6%,但仍明显高于 UniPi 和 VPP。
5.5 embodied pre-training 的视频质量收益
| 配置 | Subject Consistency | Background Consistency | Imaging Quality |
|---|---|---|---|
| Vidu 2.0 | 0.565 | 0.800 | 0.345 |
| + Embodied Pre-training | 0.855 | 0.909 | 0.667 |
VBench 指标显示,机器人视频预训练显著提升主体一致性、背景一致性和成像质量。对机器人控制来说,subject consistency 不是纯视觉美观指标,它关系到手臂、物体和接触关系是否在整个 rollout 中保持稳定。
5.6 MIDM 泛化结果
| 逆动力学模型 | Training Accuracy | Testing Accuracy | Testing $l_1$ Error |
|---|---|---|---|
| ResNet | 99.9% | 24.3% | 0.0430 |
| MIDM | 99.9% | 49.0% | 0.0308 |
训练集上两者都几乎满分,但测试集 MIDM 成功率翻倍,说明 ResNet 更容易利用背景或纹理捷径,MIDM 的稀疏 mask 正则有助于把注意力拉回动作相关区域。
5.7 消融实验
| 配置 | Seen Tasks & Backgrounds | Unseen Tasks | Unseen Backgrounds |
|---|---|---|---|
| Vidar w/o TTS | 45.5% | 33.3% | 44.4% |
| Vidar w/o MIDM | 59.1% | 26.7% | 22.2% |
| Vidar | 68.2% | 66.7% | 55.6% |
TTS 对 unseen tasks 提升很明显,从 33.3% 到 66.7%;MIDM 对 unseen background 尤其关键,从 22.2% 到 55.6%。这与论文叙事一致:TTS 主要筛掉任务不匹配或物理不合理的视频,MIDM 主要抵抗背景干扰。
5.8 附录中的补充结果
MIDM 的 $\lambda$
$\lambda=3\times10^{-3}$ 最好:testing accuracy 49.0%,testing $l_1$ error 0.0308。过大 $\lambda=10^{-1}$ 会 mask 太稀疏,测试准确率只有 7.1%;过小 $\lambda=10^{-4}$ 则约束不足,测试准确率 24.4%。
Wan2.2 附加真实实验
在 14 个真实任务上,Vidar-Wan2.2 的 seen cases 平均 69.3%,Pi0.5 为 34.3%;unseen cases 平均 67.1%,Pi0.5 为 12.9%。这支持方法不完全绑定 Vidu 2.0。
HunyuanVideo 附加实验
六个任务平均成功率 58.3%,其中抓苹果放入蒸锅为 100%,抓杯柄为 25%,堆积木为 20%。说明换 backbone 可行,但不同任务差异仍大。
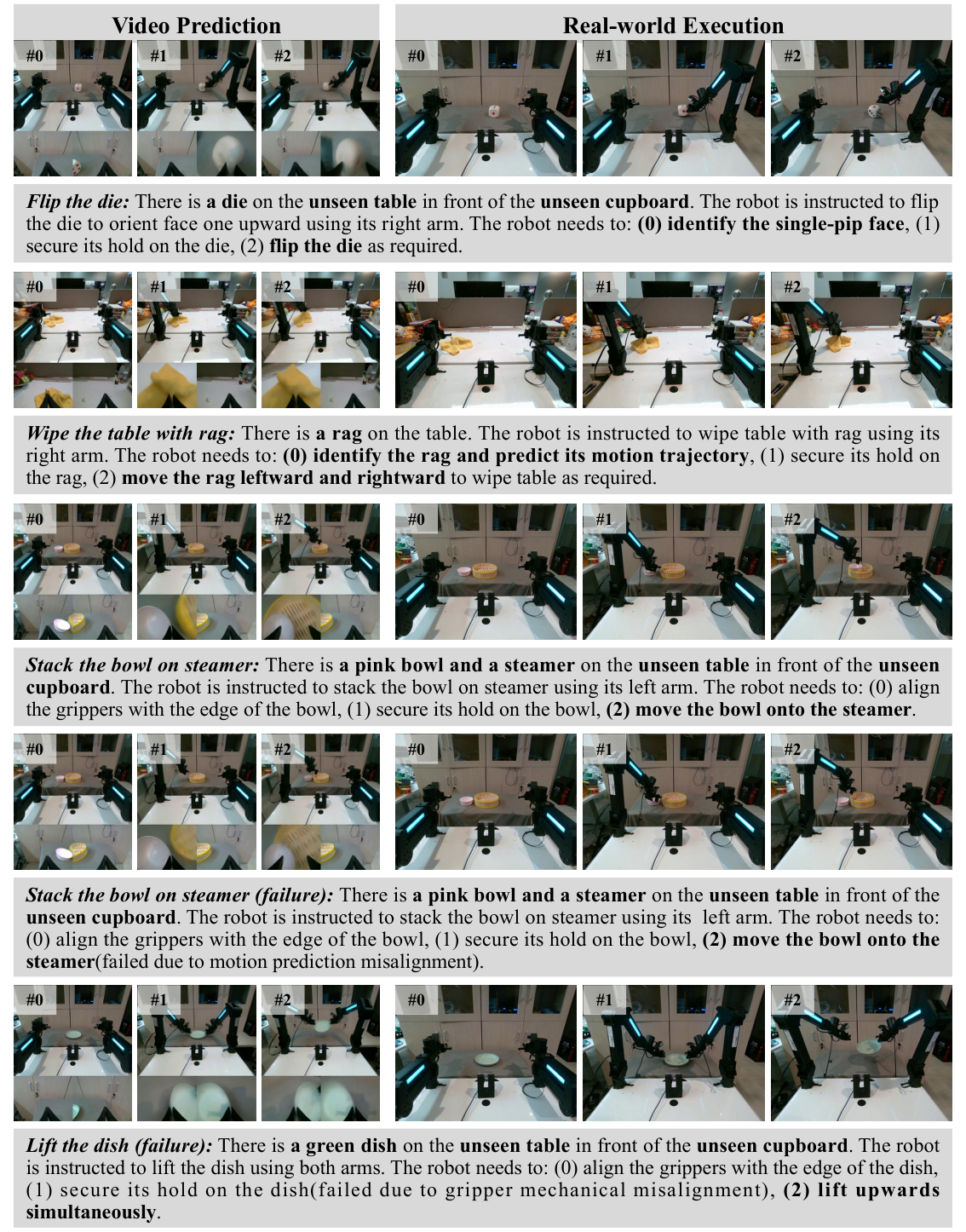
失败案例
附录额外可视化包含成功和失败案例。报告读者应关注失败是否来自视频预测不合理、TTS 选错、MIDM 动作解码失败,还是开环执行误差累积。
6. 复现要点
6.1 数据处理
- 把每个数据集 episode 转成统一多视角图像布局;腕部或信息较少视角会 resize 后拼接。
- 给每条数据补充机器人、相机和任务描述,形成 $l_r,l_c,l_t$。
- 过滤少于三视角或短于四秒的数据;Agibot 用 frame-level annotation 切分短 clips。
- RoboTwin low data 特意调整相机,使两只手臂完整可见,以利于 MIDM 学动作。
6.2 训练资源
| 模块 | 资源与训练 |
|---|---|
| Vidu 2.0 | 64 张 NVIDIA Ampere 80GB GPU,23,000 iterations,约 64 小时;10,000 pre-training,其余 fine-tuning。 |
| Wan2.2 | 5B 参数;pre-train lr $2\times10^{-5}$,fine-tune lr $2\times10^{-5}$,warm-up 200,pre-training 10K,fine-tuning 12K。 |
| HunyuanVideo | 13B 参数;64 张 NVIDIA Hopper 80GB GPU,约 54 小时;pre-training 10K,fine-tuning 2K。 |
| MIDM | 92M 参数;8 张 NVIDIA Hopper 80GB GPU,60,000 iterations,约 5 小时。 |
6.3 MIDM 超参数
| 超参数 | 值 |
|---|---|
| Mask network | U-Net,5 层 down/up sampling |
| Action network | ResNet-50 |
| Loss | Huber loss + $\lambda\|m\|_1$ |
| Learning rate | $5\times10^{-4}$ |
| Warm-up | 6000 steps |
| AdamW | $\beta=(0.9,0.999)$,$\epsilon=10^{-8}$,weight decay $10^{-2}$ |
| Mask sparsity | $\lambda=3\times10^{-3}$ |
6.4 推理流程
- 输入当前多视角观察和任务文本。
- 视频模型一次性生成 60 frames,8 fps,即 7.5 秒未来视频。
- 真实实验生成 $K=3$ 条候选,抽取 5 到 7 帧交给 GPT-4o 根据任务与物理合理性排序。
- 选中视频后,MIDM 在本地运行,把视频帧转换成动作序列。
- 执行为 open-loop,生成后不再根据执行中观察重新规划。
7. 分析、局限与边界
7.1 这篇论文最有价值的地方
最有价值的地方是它给出了一个很清晰的跨 embodiment 迁移拆分:不要强行统一动作空间,而是先统一视频观察空间,让大视频模型学习跨机器人、跨视角的操作动态,再用目标平台少量动作数据训练逆动力学适配器。这个思路把昂贵的机器人动作监督压缩到最后一步,和当前大模型时代“先学通用先验,再低成本对齐”的范式非常一致。
第二个价值点是 MIDM 的设计很朴素但抓住了真实机器人泛化中的痛点:背景、反光、视角变化会让普通图像到动作模型过拟合捷径,而动作监督加稀疏 mask 可以在没有分割标签的情况下逼模型关注手臂和接触区域。
7.2 结果为什么站得住
- 主结果不是单一场景:同时覆盖 RoboTwin 仿真、真实 seen task、真实 unseen task 和真实 unseen background。
- 有强基线 Pi0.5、UniPi、VPP,并且作者解释了 Pi0 leaderboard 与多任务设置的可比性问题。
- 消融直接对应方法组件:w/o TTS 和 w/o MIDM 分别验证推理重排和 masked inverse dynamics 的贡献。
- 附录提供逐任务表格,不只给平均数;可以看到很多任务的差异,例如 handover、hanging mug、put bottles 等仍然很难。
- VBench 和 MIDM 训练/测试对比提供机制证据:embodied pre-training 提升视频一致性,MIDM 提升测试动作预测而非仅训练拟合。
7.3 主要局限
- 强依赖可观察性:附录硬件部分明确指出,中间视频必须包含动作预测所需信息。Aloha 原始视角中手臂关节常出视野,所以作者调整了中心相机。很多商业平台未必能这样布置相机。
- 开环执行:真实实验中视频一次生成、动作一次执行,不是闭环视觉反馈控制。长时程任务或扰动场景下,误差可能累积。
- 推理延迟高:60 帧视频生成约 25 秒,TTS 还要额外 GPT-4o 排序。作者也承认需要蒸馏或量化降低成本。
- TTS 依赖外部 evaluator:GPT-4o 排序能提升结果,但 evaluator 的偏差、成本和复现稳定性都要额外考虑。
- 真实实验规模仍有限:81 个任务、232 episodes 很有说服力,但相比部署级泛化仍不够大,尤其双臂复杂接触任务的失败类型需要更系统分析。
- 视频可行动性没有完全保证:扩散视频可能看起来合理但在动力学上不可执行,MIDM 只能把已选视频转换为动作,不能保证动作一定完成任务。
7.4 边界条件
| 适用条件 | 不适用或需谨慎的条件 |
|---|---|
| 有多视角 RGB 视频,且手臂、夹爪、接触物体大多可见。 | 关键状态在图像外,例如关节角、力、被遮挡接触点,视频无法反推出动作。 |
| 任务允许秒级或更长推理延迟,且可以 open-loop 执行一段时间。 | 高速动态、实时避障、强人机交互安全约束。 |
| 目标平台能采少量高质量示范,并能用同样相机布局训练 MIDM。 | 相机布局频繁变化或示范动作噪声很大。 |
| 语义明确、视觉上可判别的视频任务。 | 需要力控、触觉或隐状态推理的精细装配任务。 |
8. 组会问答准备
Q1: Vidar 和 UniPi 最大区别是什么?
UniPi 也用视频作为中间规划表示,但 Vidar 更强调大规模 embodied video pre-training、统一多视角观察空间,以及目标平台上的 MIDM 动作解码。真实实验里 UniPi 直接 fine-tune Vidu 2.0 并用 ResNet IDM,缺少异构机器人视频预训练和 mask 机制。
Q2: 为什么视频模型不直接输出动作?
作者想避免动作空间异构带来的 embodiment gap。不同机器人关节、夹爪、控制频率不同,直接统一动作很困难;视频空间更通用,可以承载语义和物理交互,再由每个目标平台训练轻量逆动力学模型。
Q3: MIDM 的 mask 为什么不需要分割标签?
因为监督来自动作预测误差。若某些像素对动作预测有用,保留它们会降低 Huber loss;同时 $\ell_1$ 正则要求 mask 尽量小,模型就倾向只保留动作相关区域。Round 通过 straight-through estimator 训练。
Q4: TTS 的作用和代价是什么?
作用是降低扩散采样的方差,从多条候选中选物理更合理、任务更匹配的视频。代价是多次视频生成和 GPT-4o 排序,真实实验 $K=3$ 时,排序约占总延迟 25%,且引入外部模型依赖。
Q5: 最可能被质疑的点是什么?
第一是可复现性:Vidu 2.0 和 GPT-4o 排序不是完全开源可控。第二是开环控制和高延迟。第三是相机调整让目标平台完整看到双臂,这对方法很关键,但实际部署中未必总能满足。
Q6: 如果继续做这条线,下一步最自然是什么?
把 Vidar 从开环视频执行改成闭环 receding horizon;把 GPT-4o TTS 替换为可本地部署的物理一致性/任务成功 evaluator;进一步把触觉、力或 proprioception 融入视频以外的状态,解决视频不可见信息问题。