F1: A Vision-Language-Action Model Bridging Understanding and Generation to Actions
1. 论文速览
难度评级:★★★★☆。阅读需要熟悉 VLA、predictive inverse dynamics、Mixture-of-Transformer、VAR/RQ-VAE next-scale image generation、flow matching action prediction,以及 LIBERO / SimplerEnv / 真实机器人评测。
关键词:Vision-Language-ActionVisual ForesightPredictive Inverse DynamicsMixture-of-TransformerFlow MatchingLong-horizon Robotics
| 阅读定位项 | 精简答案 |
|---|---|
| 论文要解决什么 | 现有 VLA 多是 reactive state-to-action mapping,在动态场景和长程任务中短视、脆弱;视觉预测策略又常缺少 VLM 语义 grounding。F1 要把语义理解、未来视觉预测和动作执行合成一条推理链。 |
| 作者的方法抓手 | Mixture-of-Transformer 三专家:understanding expert 处理语言和当前观测;generation expert 用 next-scale prediction 生成 goal-conditioned foresight image;action expert 以 foresight 为显式目标,用 flow matching 生成动作 chunk。 |
| 最重要的结果 | 真实 Genie-1 九任务平均成功率 82.2%,高于 $\pi_0$ 的 65.2%;LIBERO 预训练版平均 95.7%,排名第一;SimplerEnv Bridge 预训练版总体平均 72.9%;动态传送带任务 66.7%,$\pi_0$ 为 33.3%。 |
| 阅读时要注意的点 | F1 的生成模块不只是训练辅助项;论文明确让模型推理时先预测未来观测,再把 action generation 改写成 foresight-guided inverse dynamics。图像不必像素完美,但必须提供 task-progress cue。 |
核心贡献清单
- 提出把 visual foresight generation 显式放入 VLA 决策管线的新范式,使动作预测从 reactive imitation 转向 planning-based control。
- 设计 UGA progressive attention,使信息按 Understanding → Generation → Action 单向流动,避免 action 反向泄漏到 foresight。
- 提出三阶段训练:Stage I 对齐 generation 和 understanding;Stage II 在大规模机器人数据上预训练全模型;Stage III 在目标 embodiment / task 上 post-train。
- 在真实机器人、LIBERO、SimplerEnv Bridge、动态场景、快速适配、长程任务和生成质量相关性上做系统评估。
2. 动机
2.1 要解决什么问题
真实机器人环境不是静态图片分类问题:物体会移动,场景会变化,指令通常需要多步展开。传统 VLA 直接从当前图像和语言映射到动作,容易在动态目标、长程序列、分布变化时产生短视行为。F1 认为,机器人在行动前需要显式预测“如果任务继续推进,下一步视觉状态应该是什么”。
这个问题被表述为 predictive inverse dynamics:先预测未来观测 $\hat{o}_{t+1}$,再推断从当前状态到这个未来视觉目标所需的动作 chunk。动作不只是当前帧的反应,而是朝向一个生成出来的视觉目标。
2.2 已有方法的局限
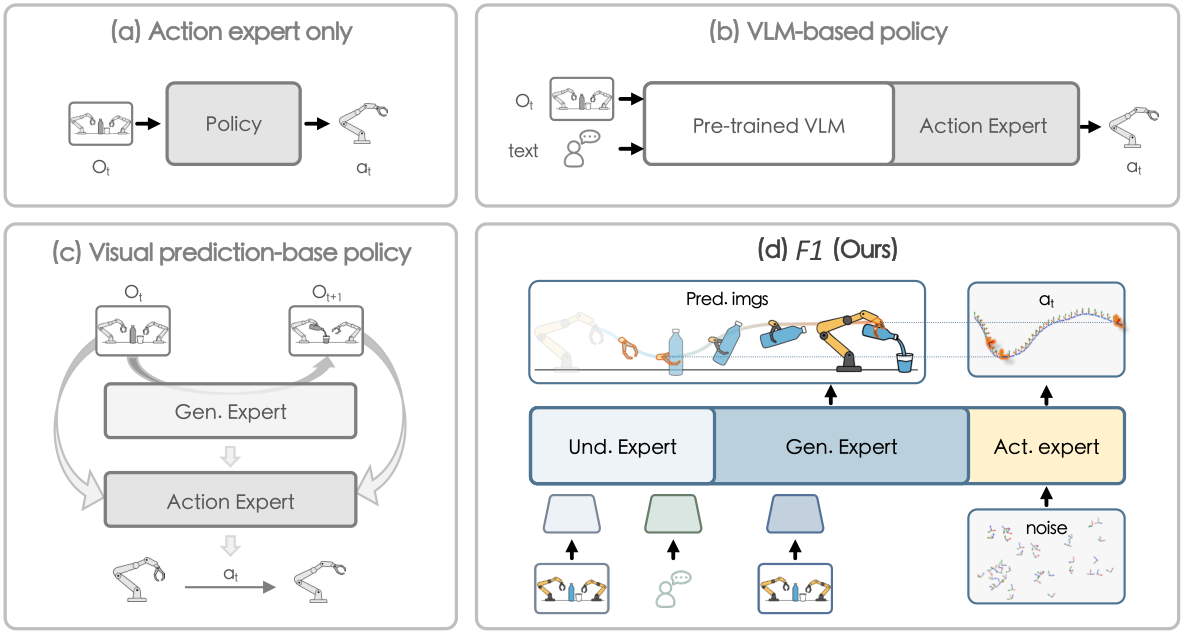
论文把 manipulation policy 分成三类。ACT、Diffusion Policy 这类 end-to-end action expert 缺少语义 grounding 和跨任务泛化;$\pi_0$、gr00t-N1 这类 VLM-integrated policy 有更强理解能力,但仍然 reactive,缺少场景演化建模;VPP、Genie Envisioner 等 visual prediction policy 能预测未来视觉,但没有充分整合 VLM 语义理解,控制鲁棒性有限。
因此,F1 的核心问题不是“再加一个视频预测损失”,而是找一种 architecture 和 training principle,把语义理解、未来视觉预测、动作执行按可控的信息流连接起来。
2.3 本文解决思路
F1 使用 MoT 三专家:understanding expert 继承 VLM 能力;generation expert 通过 RQ-VAE / next-scale prediction 生成 foresight;action expert 把当前观测、语言、proprioception 和预测未来图像一起作为条件,通过 flow matching 生成连续动作 chunk。训练上先让 generation 学会和 understanding 对齐,再在大规模机器人数据上联合预训练,最后针对具体平台 post-train。
4. 方法详解
4.1 整体 pipeline
给定语言指令 $l$、当前观测 $o_t$ 和历史观测 $\{o_{t-m}, \ldots, o_{t-1}\}$,F1 的计算链如下:
Input: instruction l, current observation o_t, history o_{t-m:t-1}, proprioception q_t
1. Understanding expert:
encode language + current visual observation into semantic multimodal representation
2. Generation expert:
use history + language + understanding representation
generate visual foresight image: o_hat_{t+1}
3. Action expert:
condition on l, o_t, q_t, o_hat_{t+1}
generate action chunk a_hat_{t:t+k} using flow matching
论文强调 $\hat{o}_{t+1}$ 是显式 planning target。action expert 不只依赖当前状态,而是向预测未来视觉状态靠拢。
4.2 Understanding Expert
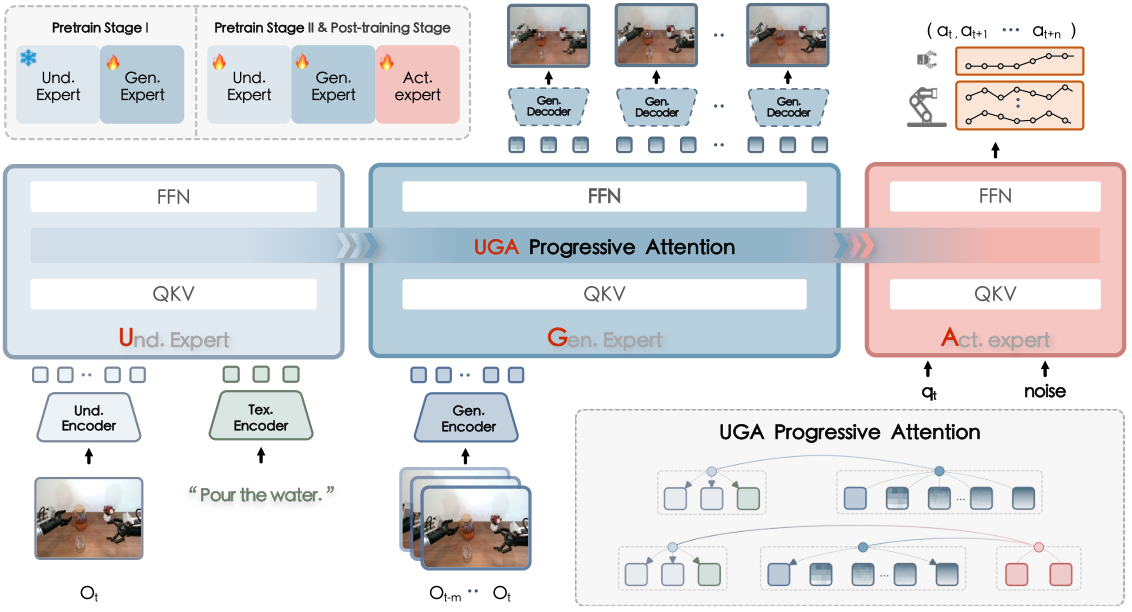
Understanding expert 初始化自 pretrained vision-language model。当前观测 $o_t$ 先由 SigLIP vision encoder 编成 high-level perceptual features,再与语言 prompt 一起输入 decoder-only Transformer。实现细节里说明 understanding expert 架构与 PaliGemma 相同,并从 $\pi_0$ 继承权重。
4.3 Generation Expert:Next-Scale Visual Foresight
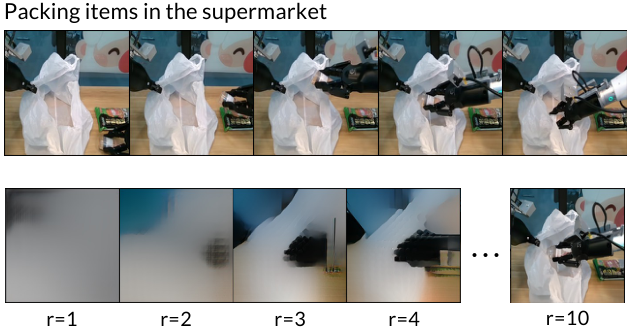
Generation expert 负责生成 $\hat{o}_{t+1}$。它不直接做高成本扩散视频生成,而是采用 VAR 风格 next-scale prediction。近期历史观测 $\{o_{t-m}, \ldots, o_t\}$ 经 multi-scale residual vector quantization 编码,每帧分解为 $16\times16$ patch 上的多尺度 token $\{z_i^0,\ldots,z_i^k\}$。为避免多帧 token 串太长,模型用 temporal convolutional network 聚合 motion-relevant features。
4.4 Action Expert:Foresight-Guided Flow Matching
Action expert 条件于语言、当前观测、foresight image 和 proprioception,输出短程 action chunk $\hat{a}_{t:t+k}$。论文采用 ACT 式 chunked action prediction,并用 flow matching 在连续动作空间中学习从高斯噪声到 expert action 的 vector field。
这个损失在训练 policy 学会:给定当前上下文和带噪动作 $a_t^\tau$,预测应朝真实动作移动的方向。
$$a_t^\tau = (1-\tau)\epsilon + \tau a_t,\quad \tau\sim\mathcal{U}(0,1),\quad \epsilon\sim\mathcal{N}(0,I)$$ $$\mathcal{L}_{\mathrm{action}} = \mathbb{E}\left[\left\|\pi_\theta(l,\{o_i\}_{i=t-m}^{t},q_t,a_t^\tau)-(a_t-\epsilon)\right\|^2\right]$$| $q_t$ | 时刻 $t$ 的 proprioception 信息。 |
| $a_t^\tau$ | 真实动作 $a_t$ 与噪声 $\epsilon$ 的插值点。 |
| $a_t-\epsilon$ | flow matching 目标向量,指向从噪声到真实动作的方向。 |
4.5 UGA Progressive Attention
UGA 指 Understanding-Generation-Action。每个 expert 内部可以进行丰富 token 交互,generation expert 中 foresight tokens 则保持 causal / scale-conditioned pattern。跨 expert 的信息流是单向层级:generation attends to understanding,action attends to both,但 action 不能反向影响 generation,understanding 也不从后续模块接收信息。
这个设计有两个作用:第一,防止训练时 action token 反向泄漏,使 foresight 真的成为中间表示;第二,让模型结构可解释为“先理解,再想象,再执行”。
4.6 三阶段训练
| 阶段 | 目标 | 训练方式 | 关键超参 附录 Training Details |
|---|---|---|---|
| Pretrain Stage I | 给 generation expert 注入 foresight 能力,并与 frozen understanding expert 对齐。 | understanding expert 继承 $\pi_0$ 并冻结;generation expert 随机初始化,用 teacher forcing 预测 ground-truth future visual tokens。 | batch 1280,lr 3e-4,cosine,512K steps,understanding resolution 224,generation resolution 256,10 predicted scales。 |
| Pretrain Stage II | 在大规模机器人数据上联合优化三专家,学习通用 visuomotor 知识。 | 使用 autoregressive predicted foresight tokens + flow matching action prediction,联合训练。 | batch 2880,lr 5e-5 constant,100K steps,Gen:Act loss weight 0.1:1,action chunk size 30,4 predicted scales。 |
| Post-train Stage III | 适配下游平台和任务。 | 在 LIBERO、Simpler、Genie-1、Franka、Dynamic、Long-horizon 等任务数据上 finetune。 | batch 128,lr 5e-5 cosine;Simpler 10 epochs,Genie/Franka/Dynamic 40 epochs,Long-horizon 60 epochs;action chunk size 分别为 4/8/50 等。 |
Stage II/III 的总目标把预测未来图像和生成动作合起来。
$$\mathcal{L}_{\mathrm{total}}=\mathcal{L}_{\mathrm{gen}}^{\mathrm{pred}}+\lambda\cdot\mathcal{L}_{\mathrm{action}}$$其中 $\mathcal{L}_{\mathrm{gen}}^{\mathrm{pred}}$ 是 autoregressive next-scale visual token NLL,$\lambda$ 控制动作损失权重。
4.7 数据规模
附录 Dataset Details 给出完整数据统计:总计 330.9K trajectories、73.8M frames,覆盖 Genie-G1、Franka、WidowX、Google Robot、ARX LIFT II,多视角包括 third-person、wrist/head,帧率 3-30 FPS。
| 数据源 | Stage | Embodiment | # Trajs | # Frames |
|---|---|---|---|---|
| Agibot-World | I + II | Genie-G1 | 187K | 66.4M |
| LIBERO | I + II + III | Franka | 1.7K | 0.3M |
| OXE-Bridge-v2 | I + II + III | WidowX | 53.2K | 1.9M |
| OXE-Fractal | I + II | Google Robot | 87.2K | 3.8M |
| In-house tasks | III | Genie-G1 / Franka / ARX LIFT II | 约 1.8K | 约 1.4M |
5. 实验
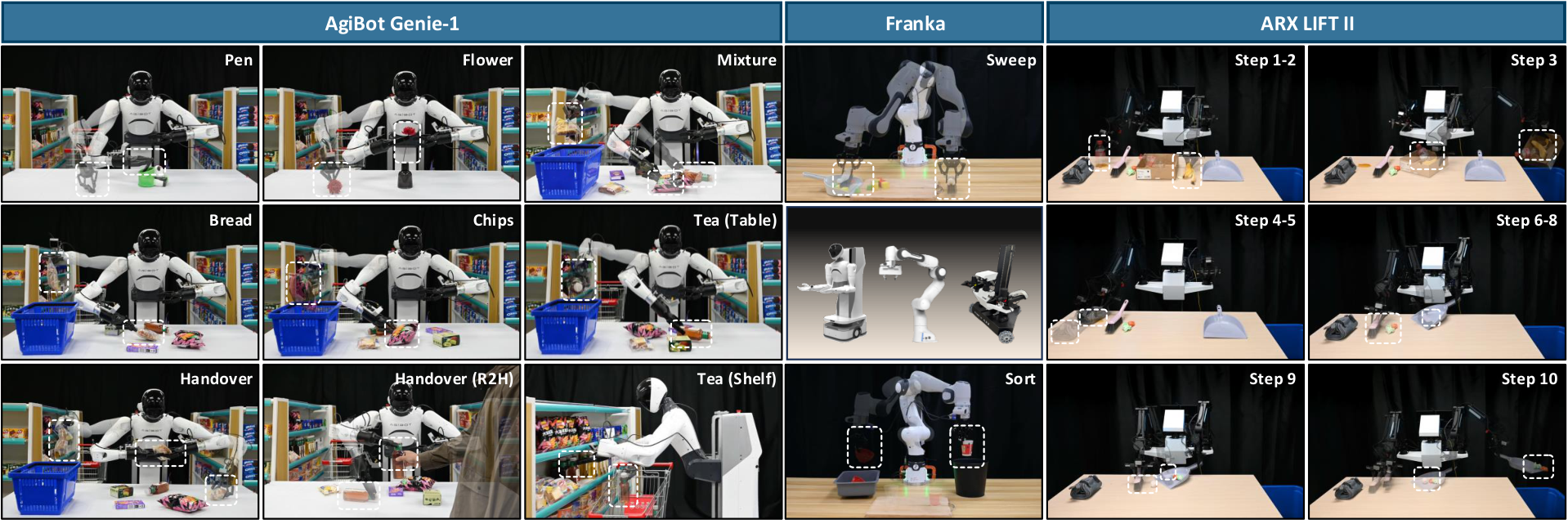
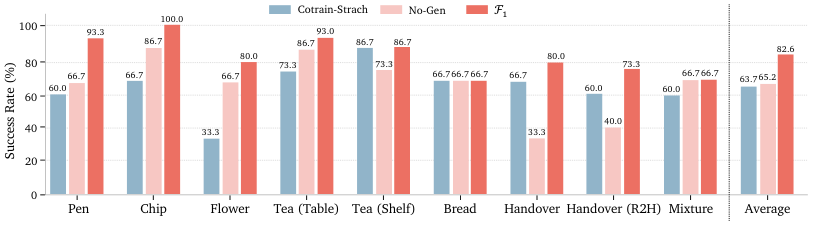
5.1 真实 Genie-1 九任务
每个任务 15 次测试,比较 $\pi_0$、gr00t-N1、gr00t-N1.5 和 F1。F1 平均成功率 82.2%,高于 $\pi_0$ 的 65.2%、gr00t-N1.5 的 53.3% 和 gr00t-N1 的 30.4%。
| 方法 | Pen | Flower | Chip | Tea Table | Tea Shelf | Bread | Handover | Handover R2H | Mixture | Avg |
|---|---|---|---|---|---|---|---|---|---|---|
| $\pi_0$ | 66.7 | 66.7 | 86.7 | 86.7 | 73.3 | 66.7 | 33.3 | 40.0 | 66.7 | 65.2 |
| gr00t-N1 | 46.7 | 33.3 | 33.3 | 40.0 | 13.3 | 33.3 | 26.7 | 13.3 | 33.3 | 30.4 |
| gr00t-N1.5 | 73.3 | 40.0 | 46.6 | 73.5 | 26.6 | 53.3 | 60.0 | 40.0 | 66.7 | 53.3 |
| F1 | 93.3 | 80.0 | 100.0 | 93.3 | 86.7 | 66.7 | 80.0 | 73.3 | 66.7 | 82.2 |
论文强调 Handover (R2H) 需要动态调整和人机交互,F1 73.3%,显著高于 $\pi_0$ 的 40.0% 和 gr00t-N1 的 13.3%。
5.2 LIBERO
| 方法 | Pretrained | Spatial | Object | Goal | Long | Average | Avg Rank |
|---|---|---|---|---|---|---|---|
| $\pi_0$ | 是 | 98.0 | 96.8 | 94.4 | 88.4 | 94.4 | 2 |
| gr00t-N1 | 是 | 94.4 | 97.6 | 93.0 | 90.6 | 93.9 | 4 |
| CoT-VLA | 是 | 87.5 | 91.6 | 87.6 | 69.0 | 83.9 | 6 |
| F1 | 否 | 97.4 | 97.6 | 94.2 | 88.0 | 94.3 | 3 |
| F1 | 是 | 98.2 | 97.8 | 95.4 | 91.3 | 95.7 | 1 |
LIBERO-Long 是长程规划压力最大的 suite,F1 预训练版达到 91.3%,超过 $\pi_0$ 的 88.4% 和 gr00t-N1 的 90.6%。这支持作者关于 foresight 对长程任务有效的论点。
5.3 SimplerEnv Bridge
| 方法 | Pretrained | Carrot Success | Eggplant Success | Spoon Success | Stack Success | Overall Avg |
|---|---|---|---|---|---|---|
| SpatialVLA | 是 | 25.0 | 100.0 | 16.7 | 29.2 | 47.9 |
| $\pi_0$ | 是 | 0.0 | 16.6 | 62.5 | 29.1 | 40.1 |
| $\pi_0$-Fast | 是 | 21.9 | 10.8 | 66.6 | 29.1 | 48.3 |
| F1 | 否 | 33.3 | 75.0 | 45.8 | 62.5 | 66.1 |
| F1 | 是 | 70.8 | 66.7 | 50.0 | 50.0 | 72.9 |
SimplerEnv Bridge 任务强调 fine-grained placement。F1 的整体平均明显高于下一个最强 baseline,论文把这一点归因于 foresight 对 source object configuration 和 target location 变化的适应能力。
5.4 仿真消融
| Variant | 含义 | Avg | 主要结论 |
|---|---|---|---|
| F1 | 完整模型 | 77.5 | 基线。 |
| Frozen-Gen | Stage I 后冻结 generation expert | 73.8 | 固定 generation 仍有用,但后续 end-to-end 适配能提升 task alignment。 |
| Cotrain-Scratch | 去掉 Stage II 大规模机器人预训练 | 74.2 | Stage II 提供 manipulation prior,稳定优化。 |
| No-Gen | 移除 generation expert | 60.3 | visual foresight 是最关键模块,去掉后 SimplerEnv 明显崩。 |
| 2-Scales | 推理只预测 2 个 planning scales | 73.4 | foresight 粗糙,规划信息不足。 |
| 6-Scales | 推理预测 6 个 planning scales | 75.8 | 更多尺度未必更好,计算更重且可能引入不稳定;论文最终用 4 scales。 |
5.5 真实任务消融与动态泛化
真实任务消融显示,No-Gen 在 Handover (R2H) 和 Mixture 中分别只有 40.0% 与 60.0%,而 F1 达到 93.3% 与 73.3%。Cotrain-Scratch 也明显低于完整模型,说明 Stage II 的大规模机器人预训练对真实下游泛化有帮助。
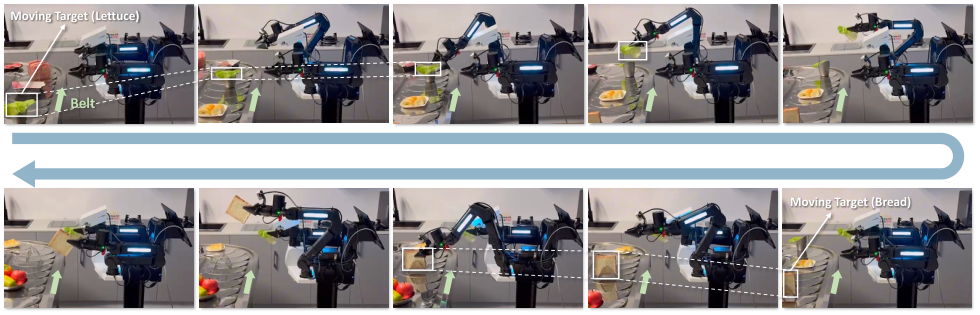
动态传送带实验使用 ARX LIFT II,这是预训练数据中没有的 robot embodiment。只用 47 条 post-train demonstrations,F1 在连续双臂动态抓取中成功率 66.7%,$\pi_0$ 为 33.3%;Lettuce 和 Bread 子任务中 F1 分别 80.0%,$\pi_0$ 为 53.3% 和 46.7%。
5.6 快速适配与长程任务
| 实验 | $\pi_0$ | F1 | 说明 |
|---|---|---|---|
| Franka sweep:成功物体数 | 4.9 / 8.0 | 7.1 / 8.0 | F1 扫得更多。 |
| Franka sweep:最大尝试次数 | 4.8 / 5.0 | 3.5 / 5.0 | F1 尝试次数更少。 |
| Franka sweep:空扫次数 | 2.4 / 5.0 | 0.8 / 5.0 | 论文解释为空扫减少反映更精准 spatial grounding。 |
| Sort 第 1/2/3 次连续抓取 | 100 / 86.7 / 53.3 | 100 / 100 / 66.7 | F1 在重复交互中保持性更好。 |
长程 ARX LIFT II 任务包含 10 个步骤、约 2 分钟。$\pi_0$ 在前两个 pickplace 步骤为 93.3%,之后基本 0%;F1 前三步 100%,第 4/5 步 93.3%,后续复杂步骤仍有 73.3%、60.0%、40.0%、40.0%、40.0%。论文承认后续步骤下降符合长程误差累积预期。
5.7 生成质量与动作可靠性
论文没有用传统 FID / PSNR 作为主要生成指标,而是用 Qwen2.5-VL-32B-Instruct 做 task-relevant evaluation。输入包括 task instruction、四帧历史、预测下一帧和 ground-truth frame;输出 scene consistency、object consistency、task progress following 三个二值分数。prompt 模板在 附录 Prompt Template 中给出。
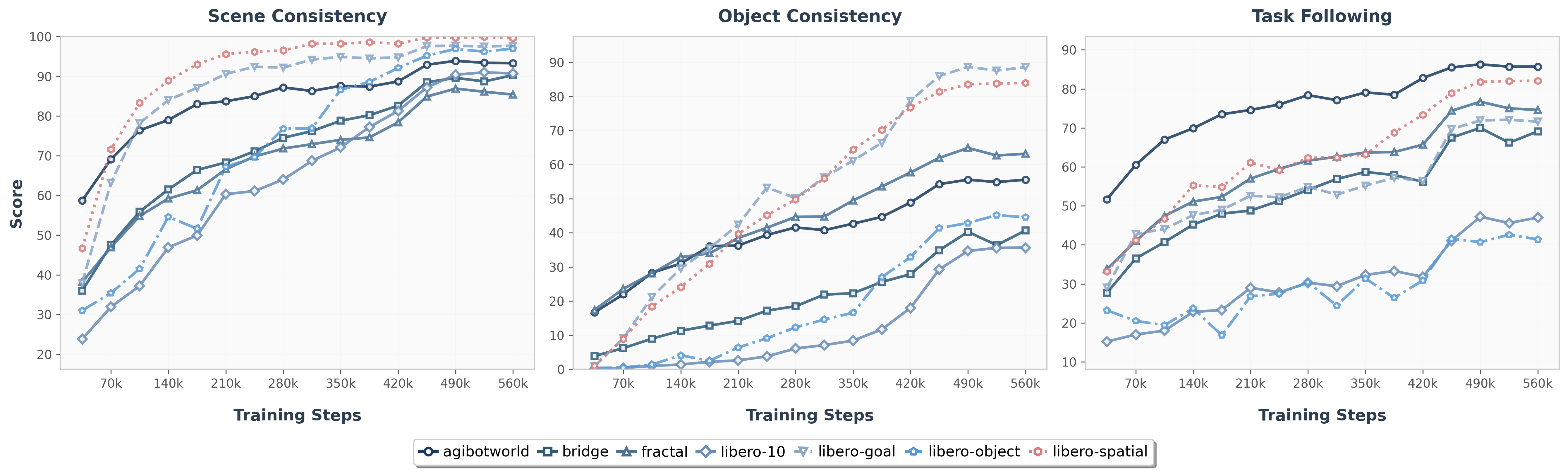
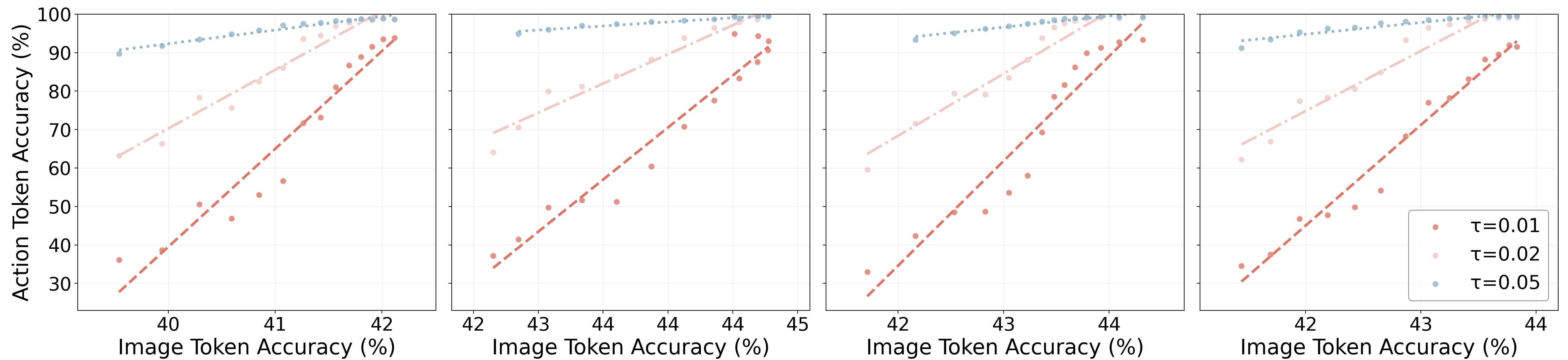
作者观察到 object consistency 曲线较低,原因是 F1 没有在大规模 generative datasets 上预训练;但 task progress following 往往超过 object consistency,说明 foresight 即使像素不完美,也能提供动作相关线索。
6. 复现审计
6.1 代码与资源
已公开:官方 GitHub 为 InternRobotics/F1-VLA,包含 f1_vla/、train_hf.py 和 README 训练入口。项目主页为 F1-VLA,HuggingFace organization 提供模型/数据入口。
README 给出的依赖:Python ≥ 3.10,torch ≥ 2.6.0,CUDA ≥ 12.4;推荐 FFmpeg + TorchCodec 加速视频数据加载。
下载项:README 指向 LIBERO no-op filtered 数据、F1_pretrain checkpoint、lerobot/pi0_base、google/paligemma-3b-pt-224、VAR VAE 权重。
6.2 复现路径
- 克隆仓库并创建环境:
git clone https://github.com/InternRobotics/F1-VLA.git,conda create -n f1_vla python==3.10。 - 安装 PyTorch CUDA 12.4 版本和仓库:
pip install torch==2.6.0 ...,进入F1-VLA/f1_vla后pip install -e .。 - 下载 README 指定 checkpoint / tokenizer / VAE / LIBERO 数据,并在配置中填写路径。
- 编辑配置:
f1_vla/config/debug_test.yaml或对应任务配置。 - 运行训练:
python train_hf.py --config-file f1_vla/config/debug_test.yaml。
6.3 部署延迟
附录 Deploy Platform and Latency Analysis:所有实验在 Intel i9 CPU + NVIDIA RTX 4090 工作站上运行,机器人通过有线 Ethernet 连接。三路同步相机输入时,总推理时间约 235ms。
| 模块 | 延迟 |
|---|---|
| image process / resize | 18ms |
| temporal downsampling | 28ms |
| image encoder | 18ms |
| foresight generation | 76ms |
| x10 action forward pass (flow) | 95ms |
| Total | 235ms |
6.4 复现风险
- 大规模训练成本高:Stage I 512K steps,Stage II 100K steps,batch size 分别 1280 / 2880,真实完整预训练不是单卡轻量复现实验。
- 真实机器人任务依赖 in-house demonstrations 和 Genie-G1 / Franka / ARX LIFT II 平台,公开代码不等于可复现实物表格。
- 生成质量评估依赖 Qwen2.5-VL-32B-Instruct 作为 evaluator,prompt 已公开在附录,但评估稳定性仍取决于模型版本和调用设置。
- 论文声称 F1 是 4.2B 参数模型,工程上还需要 PaliGemma / $\pi_0$ / VAR VAE 等初始化资源和多视角视频处理链路。
7. 分析、局限与边界
7.1 这篇论文最有价值的地方
基于论文自身证据,最有价值的是把 “future image prediction” 从辅助训练目标提升为推理时的显式规划中间变量。F1 让 generation expert 先产出 visual foresight,再让 action expert 以它为目标做 inverse dynamics,这比单纯在 backbone 上加一个动作头更接近“先想象再执行”的结构。消融中 No-Gen 从 77.5% 降到 60.3%,真实 Handover (R2H) 和动态传送带任务也显示 foresight 对复杂动态特别重要。
7.2 结果为什么站得住
论文的证据链比较完整:真实九任务显示 F1 相对 $\pi_0$ 提升平均成功率;LIBERO 和 SimplerEnv 提供仿真基准;Frozen-Gen、Cotrain-Scratch、No-Gen、2/6 scales 消融分别验证 generation 可训练性、Stage II 预训练、generation expert 本身、推理 scale 数;动态传送带、Franka 快速适配和 10-step 长程任务展示了超出短程静态抓取的场景;生成质量章节又说明 foresight quality 与 action accuracy 正相关。
7.3 作者自述的局限与未来方向
- Foresight image 的像素级细节仍有限,尤其是网格购物车、塑料袋、衣物等细粒度或可变形物体。作者把原因归于没有在大规模生成式数据集上预训练 generation expert。
- 长程任务后半段成功率下降明显,论文解释为长程误差累积和复杂推理难度上升。
- 未来方向包括扩展到更多 embodiments 和 task families,如 locomotion、dexterous manipulation、multi-agent collaboration。
- 作者还提出可用 structured world models 或 physics-informed priors 增强 foresight,结合 reinforcement learning / online adaptation / human feedback 做持续改进。
7.4 适用边界
F1 适合未来视觉状态能为动作提供明确规划目标的 manipulation 任务,尤其是动态目标、长程步骤、手眼协调和跨平台适配。它较依赖多视角历史图像、proprioception、生成式视觉 tokenization 和较重的推理链。对于不可见接触力、纯触觉反馈、极高速闭环控制、或目标状态无法通过图像表达的任务,论文证据还不足。