1. 论文速览
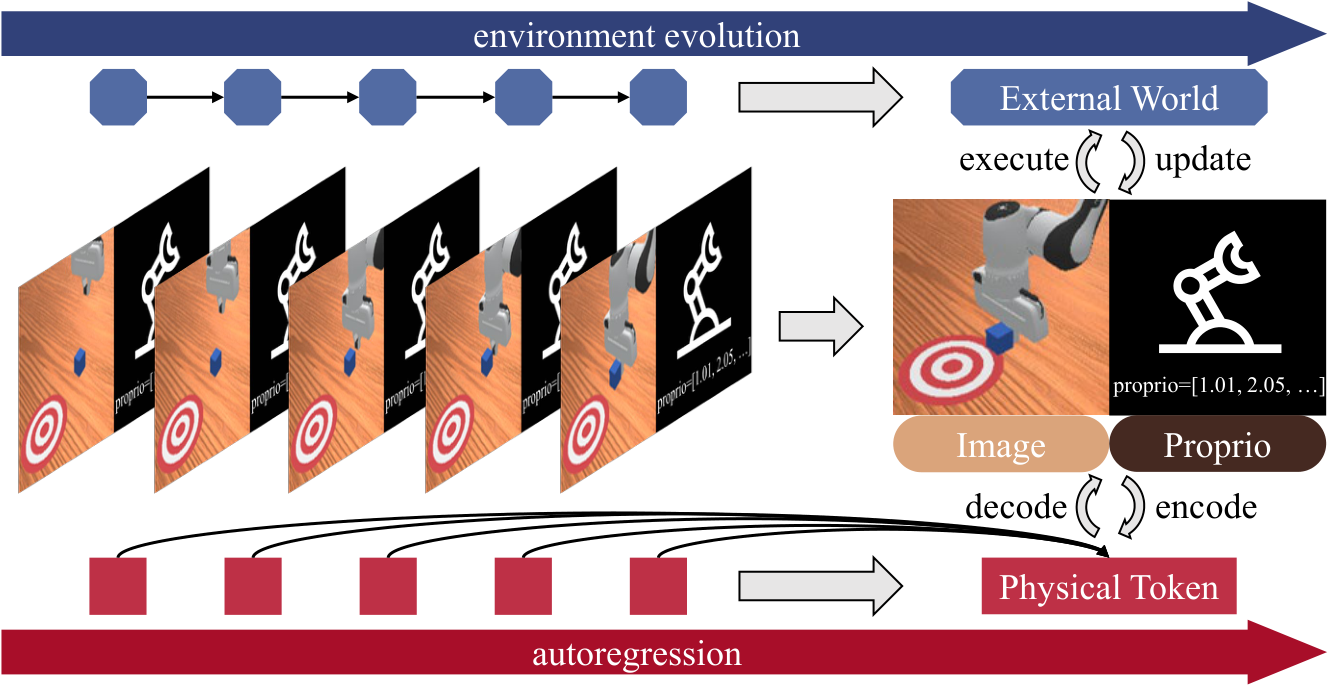
PhysGen 的核心想法是:不要只把预训练语言模型当机器人策略的“大脑”,也可以把预训练自回归视频生成模型当作一个隐式物理模拟器。模型把视觉帧和动作块投到同一个连续 physical token 空间,用 causal transformer 预测下一组“视觉+动作”token,再用扩散式 de-tokenizer 还原未来图像和可执行动作。
| 论文要解决什么 | 机器人操作缺少大规模动作示教数据;VLA 依赖 LLM/VLM 的符号知识,但操作需要连续空间、时间和物理交互。作者希望从视频生成模型中迁移“物体会怎样运动”的物理先验,用较少机器人数据学控制。 |
|---|---|
| 作者的方法抓手 | 基于 NOVA 自回归视频生成 backbone,提出 PhysGen:将视频帧 token 与 action chunk token 拼成 physical token;用连续扩散 de-tokenizer 建模视觉和动作分布;加入 inverse-kinematics causal mask、Lookahead Multi-Token Prediction、LoRA 训练和 KV-cache 推理。 |
| 最重要的结果 | LIBERO 平均成功率 90.8%,高于 OpenVLA 77%、WorldVLA 82%、Pi0-Fast 86%;ManiSkill 平均 74%,PushCube 达 100%;真实 Franka Panda 四任务平均 75%,与 Pi0 持平,并在透明物体抓取上 75% vs Pi0 70%。 |
| 阅读时要注意的点 | “视频生成模型当物理模拟器”是强主张,但实现上不是直接拿视频生成结果规划,而是把视频生成 backbone 改成 joint video-action autoregression。核心证据来自连续 token、视频预训练、AR rollout、L-MTP 的消融。 |
2. 动机与问题
2.1 为什么不是继续堆动作数据
论文从机器人数据稀缺出发:大规模 generative pretraining 在 NLP 和视觉里能带来跨任务泛化,但机器人动作示教昂贵、耗时、硬件强相关。VLA 方法把 LLM/VLM 接到 action head 上,能迁移语言和视觉知识,但 text/action 之间存在模态鸿沟:语言是符号描述,机器人动作是连续、几何、时间敏感的控制信号。
作者认为视频生成模型更接近机器人需要的知识:视频模型必须从历史帧预测未来帧,因此隐式学习 object permanence、接触后的运动趋势、时间一致性等物理先验。自回归视频生成尤其像控制中的 sequential decision process,因为它一步步滚动预测未来。
2.2 传统 tokenization 的问题
许多 autoregressive 模型依赖离散 token。离散化对语言自然,但图像 latent 和动作本质是连续信号,量化会带来 resolution error。对机器人来说,小的动作量化误差可能在长时序中累积成轨迹漂移。PhysGen 因此主张连续 token:视觉和动作都在连续 embedding 空间建模,再用 diffusion loss 学条件分布。
3. 相关工作定位
| 方向 | 代表方法 | 作者如何定位 PhysGen |
|---|---|---|
| Vision-Language-Action Models | RT 系列、OpenVLA、$\pi_0$、GR00T 等 | 这些方法多从 LLM/VLM 迁移知识,再接 action head。PhysGen 同样用 autoregressive 架构,但 backbone 来自视频生成模型而不是语言模型。 |
| Video-Action Joint Prediction | WorldVLA、UWM、UniMimic、UVA 等 | 已有工作联合预测视觉和动作,但 PhysGen 强调 step-by-step physical autoregression,并用共享连续 token 表征来减小离散化误差。 |
| Non-Quantized Autoregressive Models | MAR、NOVA 等 | MAR 用 denoising process 建模连续 token 条件分布;NOVA 将其扩展到视频生成。PhysGen 在此基础上加入 action token,变成统一视觉-动作自回归。 |
4. 预备知识
4.1 Diffusion loss 如何作为连续 token 的概率模型
普通扩散模型把干净样本 $x_0$ 逐步加噪:
$$q(x_t \mid x_{t-1})=\mathcal{N}(x_t;\sqrt{1-\beta_t}x_{t-1},\beta_t I).$$
训练目标是让网络预测注入的噪声:
$$L(\theta)=\mathbb{E}_{t,x_0,\epsilon}\left[\left\|\epsilon-\epsilon_\theta(\sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon,t)\right\|^2\right].$$
MAR/NOVA 的关键启发是:给定 autoregressive context $z$,可以不用把连续信号量化成离散词表,而是直接训练 denoiser $\epsilon_\theta(x_t|t,z)$ 学 $p(x|z)$:
$$\mathcal{L}(z,x)=\mathbb{E}_{\epsilon,t}\left[\|\epsilon-\epsilon_\theta(x_t|t,z)\|^2\right].$$
PhysGen 把这个思想用于 frame token 和 action token 的 de-tokenization。
4.2 NOVA 提供了什么
NOVA 是连续、非量化的自回归视频生成模型。它按时间建模:
$$p(l,S_1,\dots,S_N)=\prod_{n=1}^{N}p(S_n|l,S_1,\dots,S_{n-1}),$$
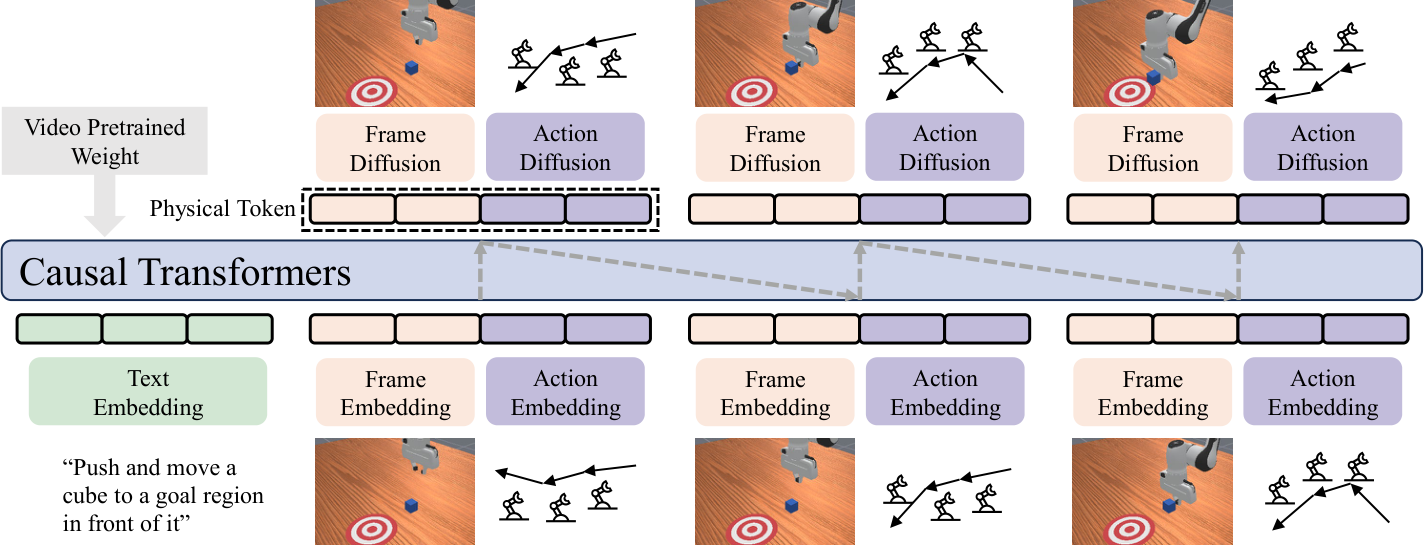
并在帧内以 token set 的形式自回归生成。PhysGen 保留 NOVA 的语言与视觉 embedding 机制,让它继承视频预训练里的世界动态知识,然后新增动作 token 和动作扩散 de-tokenizer。
5. 方法详解
5.1 输入输出:从历史视觉和动作预测下一步
在第 $n$ 步,PhysGen 输入任务指令 $l$、历史图像 $\{O_0,\dots,O_{N-1}\}$ 与对应动作块 $\{A_1,\dots,A_{N-1}\}$,输出下一帧视觉状态 $O_N$ 和下一段动作块 $A_N$。每个动作块 $A_n$ 包含 $L$ 个连续动作,实验中 $L=8$。
这种 formulation 的意义是:模型不是只预测动作,而是预测“动作和环境一起怎样演化”。这让它更像 predictive world interaction model,而不是纯 policy head。
5.2 Tokenizer:把语言、视觉、动作放进同一空间
| 模态 | 编码方式 | 是否冻结 | 输出 |
|---|---|---|---|
| 语言指令 | Phi language model tokenizer/encoder | 冻结 | $E_l\in\mathbb{R}^{K_l\times d}$ |
| 视觉帧 | NOVA 原有 3D-VAE,flatten 成 frame tokens | 冻结 | $E_{O,n}\in\mathbb{R}^{K_O\times d}$ |
| 动作块 | MLP action tokenizer | 训练 | $E_{A,n}\in\mathbb{R}^{K_A\times d}$,其中 $K_A=L$ |
每个 physical token 由视觉 token 和动作 token 沿序列维拼接:
$$P_n=[E_{O,n};E_{A,n}],\quad P_n\in\mathbb{R}^{(K_O+K_A)\times d}.$$
由于观察先于动作,作者在动作序列前加入一个 learnable Begin-of-Action token 来对齐长度。
5.3 Physical Autoregression
PhysGen 沿用 LLM 的 token-by-token autoregression,但 token 现在代表视觉和动作的联合物理状态:
$$p(E_l,P_0,\dots,P_N)=\prod_{n=0}^{N}p(P_n|E_l,P_0,\dots,P_{n-1}).$$
条件分布由复制 NOVA 架构的 Causal Transformer 参数化。Transformer 输出条件向量 $Z_n$:
$$Z_n=\mathrm{Transformer}(l,P_0,\dots,P_{n-1}).$$
5.4 De-tokenizer:连续扩散还原视觉和动作
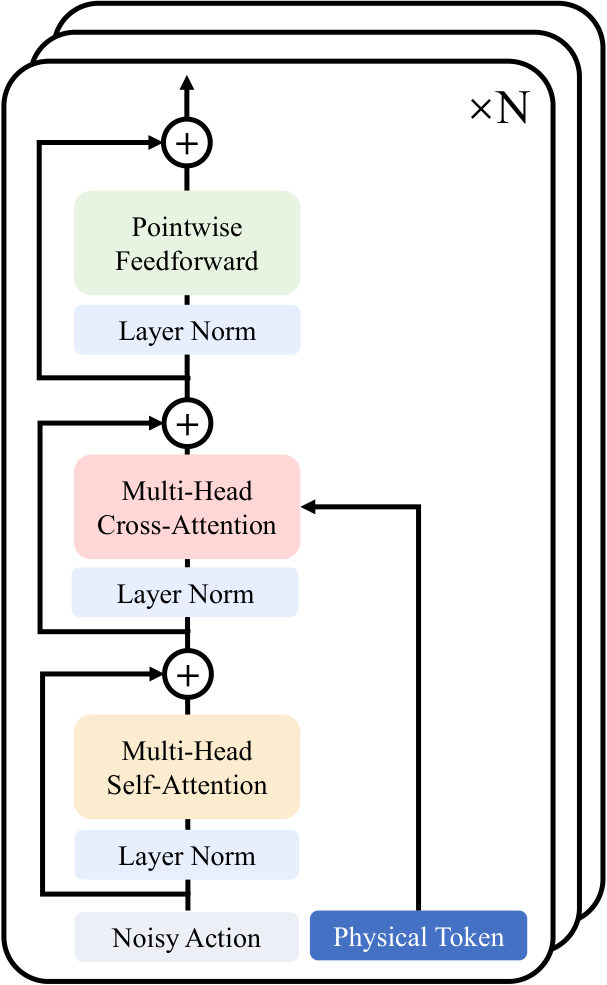
给定 $Z_n$,PhysGen 用 DiT-based denoising process 估计 $p(P_n|Z_n)$:
$$\mathcal{L}(P_n,Z_n)=\mathbb{E}_{\epsilon,t}\left[\|\epsilon-\epsilon_\theta(P_{n,t}|t,Z_n)\|^2\right].$$
反向采样形式为:
$$P_{n,t-1}=\frac{1}{\sqrt{\alpha_t}}\left(P_{n,t}-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}}\epsilon_\theta(P_{n,t}|t,Z_n)\right)+\sigma_t\delta.$$
视觉和动作的 de-tokenization 分开做:frame token 使用 NOVA 的重建范式;action token 使用轻量 Action-DiT,条件向量通过 cross-attention 注入。
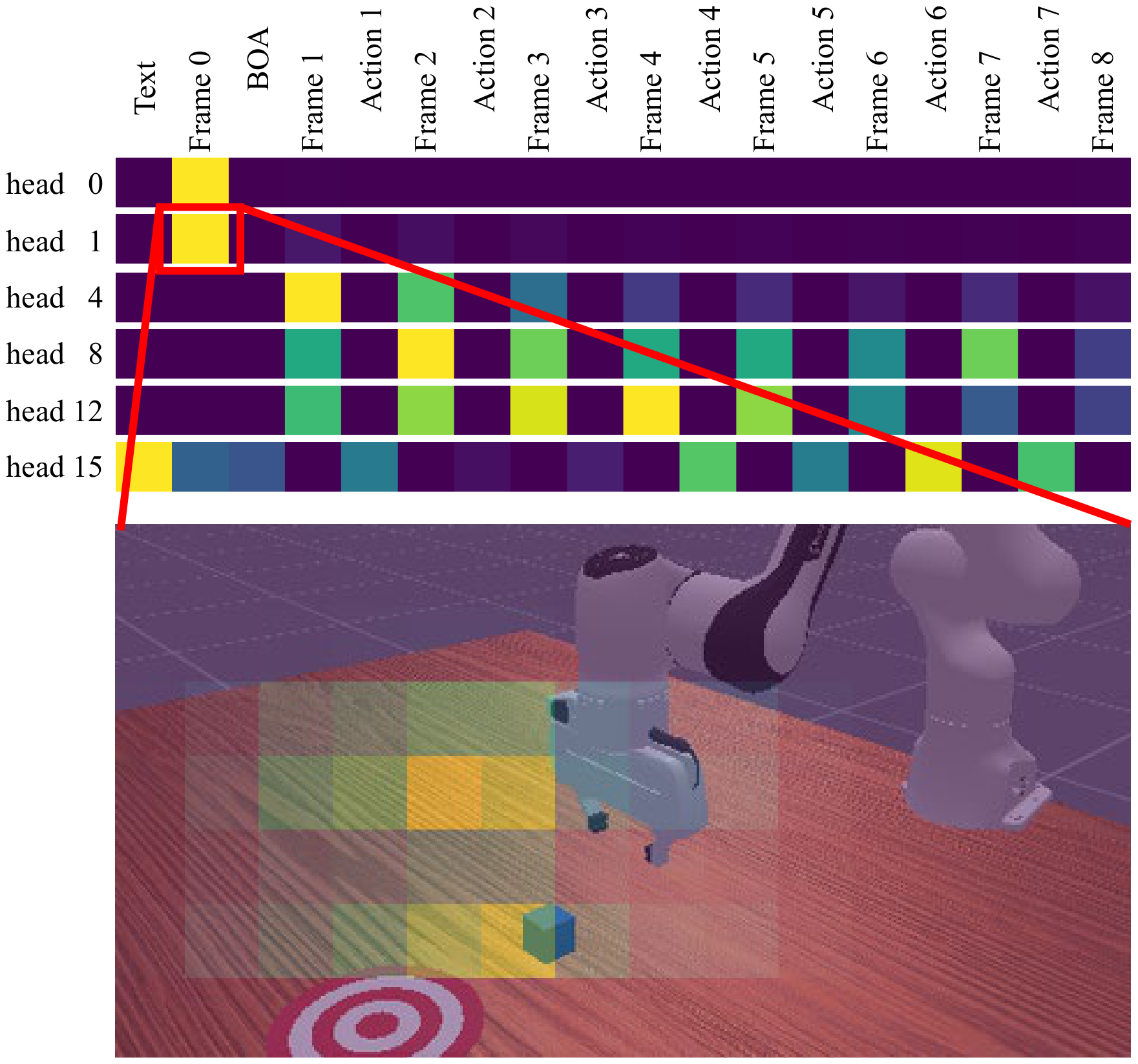
5.5 Causal Mask 与隐式逆运动学
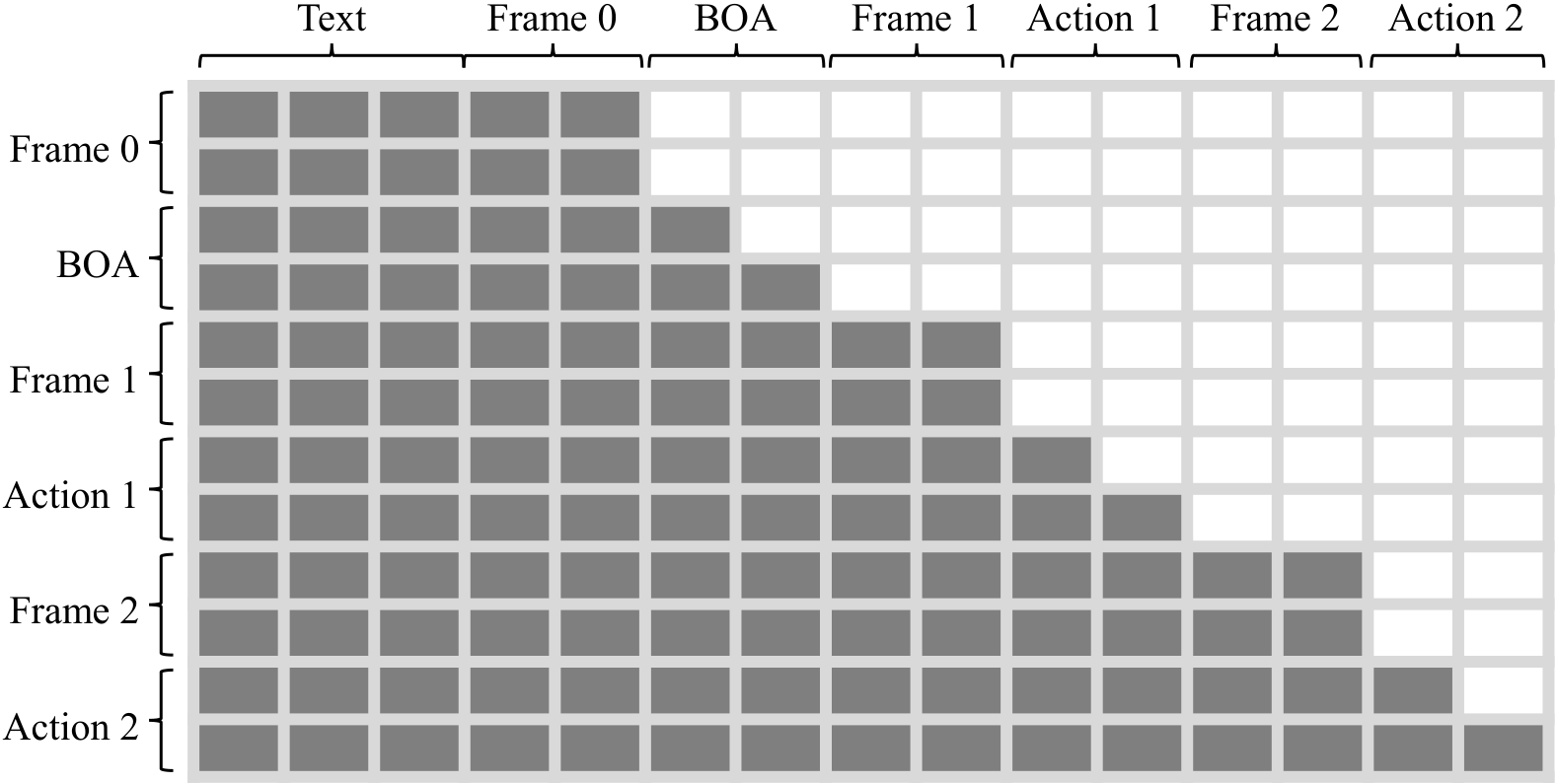
PhysGen 的 attention mask 是为“帧+动作”的联合 token 设计的。
- frame part 使用 chunk-wise full attention:同一帧内 patch 可以互相注意。
- action part 使用 temporal causal attention:动作块内早期动作不能看后续动作。
- action tokens 可以单向 attend 到 frame tokens:动作规划可以条件化于视觉状态,作者称其促进 implicit inverse kinematics。
- 跨 chunk 保持 temporal causality,避免未来信息泄漏。
5.6 Lookahead Multi-Token Prediction
L-MTP 把 lookahead action generation 和 Multi-Token Prediction 结合起来。每个自回归 step 中,action de-tokenizer 并行生成多个未来 token,论文实现中为 3 个 token。训练时监督所有预测 token;推理时只执行第一个 token,剩余 token 作为 lookahead 信息条件化后续预测。
这相当于让模型在执行当前动作时保留短期未来计划,缓解单 token rollout 的短视问题,并改善长时序一致性。
5.7 训练目标与实现细节
总损失是序列上 frame 与 action 的平均扩散损失:
$$loss=\sum_{n=1}^{N}\mathcal{L}(Z_n,P_n)=\sum_{n=1}^{N}\left(\mathcal{L}_{obs}(Z_n,E_{O,n})+\mathcal{L}_{act}(Z_n,E_{A,n})\right).$$
| 项目 | 设置 |
|---|---|
| 动作块长度 | $L=8$ |
| Transformer 最大上下文 | 2096 tokens |
| 上下文构成 | 256 language tokens + 5 个 physical token packages |
| 每个 physical package | 360 visual tokens + 8 action tokens |
| 多视角输入 | 拼接为一张图,送入 VAE 和 AR transformer |
| 训练效率 | teacher forcing 全并行;Transformer backbone 使用 LoRA 微调 |
| 推理效率 | KV-cache 缓存每层中间特征 |
| 硬件与时间 | 单张 NVIDIA A100-SXM4-80GB;最长训练 60 GPU hours |
| 位置编码 | RoPE;frame 与 action token 使用不同频率设置 |
6. 实验与复现
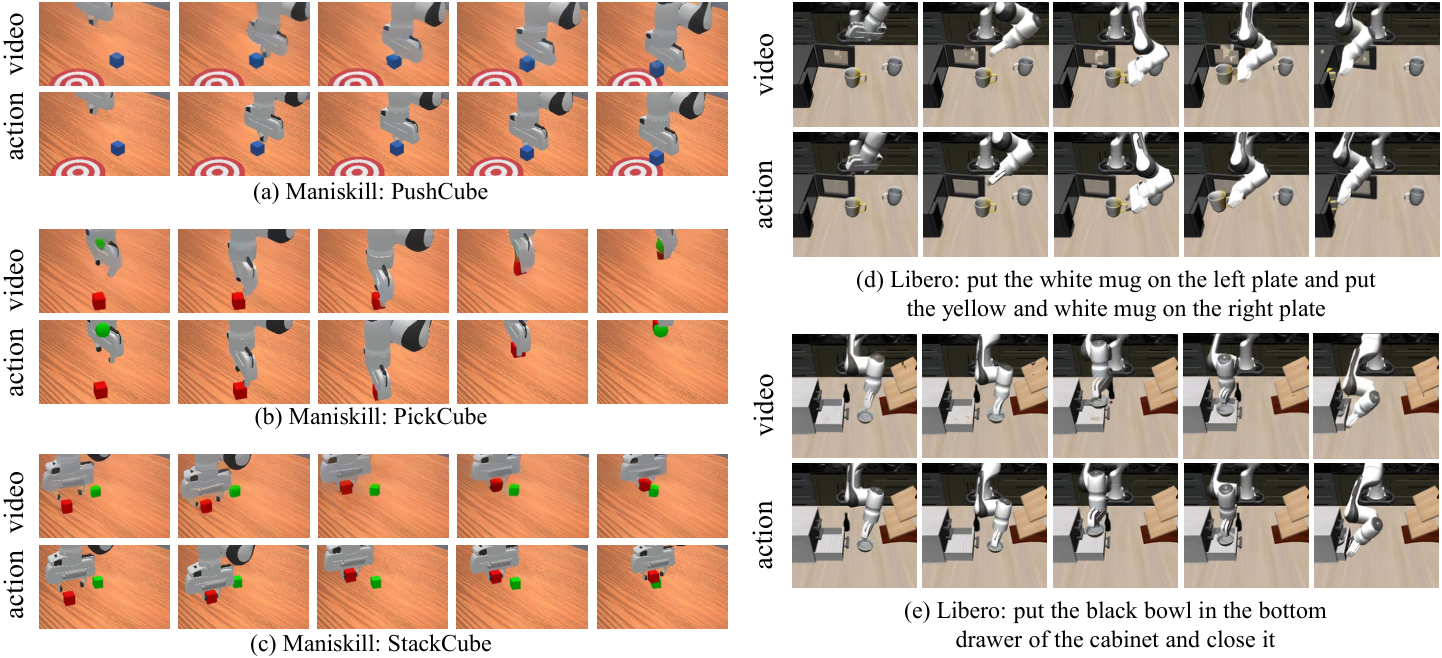
6.1 LIBERO 仿真实验
LIBERO 实验评估四个 suite:Spatial、Object、Goal、Long。每个 suite 约 400 demonstrations 微调,500 rollouts 评估,指标为 success rate。作者强调“no action pretraining”表示 backbone 没有在大规模 manipulation/action 数据上预训练。
| Method | Params | Spatial | Object | Goal | Long | Avg. |
|---|---|---|---|---|---|---|
| DP, w/o action pretraining | - | 78 | 93 | 68 | 51 | 72 |
| OpenVLA | 7B | 85 | 88 | 79 | 54 | 77 |
| ThinkAct | 7B | 88 | 91 | 87 | 71 | 84 |
| Pi0-Fast | 3B | 96 | 97 | 89 | 60 | 86 |
| MolmoACT | 7B | 87 | 95 | 88 | 77 | 87 |
| UniMimic, w/o action pretraining | ~200M | 71 | 79 | 67 | 29 | 62 |
| WorldVLA, w/o action pretraining | 7B | 88 | 96 | 83 | 60 | 82 |
| PhysGen, w/o action pretraining | 732M | 91.0 | 99.6 | 93.8 | 78.8 | 90.8 |
结果解释重点:PhysGen 平均 90.8,不只超过 LLM/VLM-based baseline,也超过视觉生成预训练 baseline WorldVLA 8.8 个点;在 Long suite 上比 WorldVLA 高 18.8 个点,这支撑作者关于连续 AR 世界交互建模改善长时序一致性的 claim。唯一较弱项是 Spatial,低于 Pi0-Fast 的 96,作者将其归因于底层视频模型空间感知有限。
6.2 ManiSkill 仿真实验
ManiSkill 选择 PushCube、PickCube、StackCube 三个任务。每任务使用 1000 demonstrations 微调,125 rollouts 评估。
| Method | PushCube | PickCube | StackCube | Avg. |
|---|---|---|---|---|
| ACT | 76 | 20 | 30 | 42 |
| BC-T | 98 | 4 | 14 | 39 |
| DP | 88 | 40 | 80 | 69 |
| ICRT | 77 | 78 | 30 | 62 |
| RDT | 100 | 77 | 74 | 84 |
| Pi0 | 100 | 60 | 48 | 69 |
| PhysGen | 100 | 73 | 48 | 74 |
ManiSkill 上 PhysGen 不如 RDT 平均高,但优于 ICRT 和 Pi0,尤其 PushCube 达 100%。这表明视频先验有帮助,但不等于在所有 manipulation setting 中全面超过 action-pretrained policy。
6.3 真实机器人实验
真实实验使用 Franka Panda,配两个 RealSense D415 摄像头,一个固定、一个腕部。四个任务是 Pick Cube、Press Button、Stack Cube、Pick Transparency。每任务收集 80-100 条 teleoperation demonstrations,评估 20 trials。ACT 从零训练,OpenVLA 和 Pi0 用官方 checkpoint 微调;PhysGen 只用这些收集数据微调,backbone 没有大规模动作预训练。
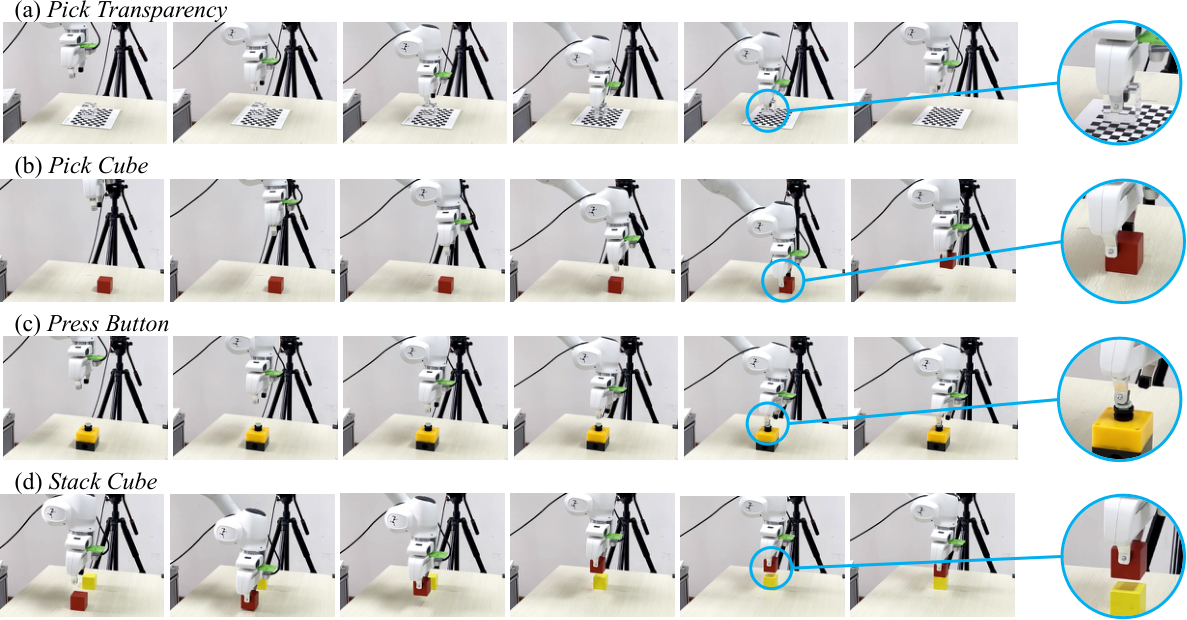
| Method | Pick Cube | Press Button | Stack Cube | Pick Transparency | Avg. |
|---|---|---|---|---|---|
| ACT | 40 | 40 | 30 | 10 | 30 |
| OpenVLA | 30 | 25 | 10 | 0 | 16.3 |
| Pi0 | 85 | 85 | 60 | 70 | 75 |
| PhysGen | 80 | 85 | 60 | 75 | 75 |
6.4 消融实验
消融在 LIBERO-Object 上进行,指标为 success rate。
| Variant | Pretrain | Token | L-MTP | Backbone | SR | 解释 |
|---|---|---|---|---|---|---|
| PhysGen-Zero | No | continuous | + | AR | 86.4 | 无视频预训练,作为检验 NOVA prior 的对照 |
| PhysGen-Discrete | NOVA | discrete | + | AR | 94.2 | 动作量化成离散词表,测试连续 token 价值 |
| PhysGen-NoAR | NOVA | continuous | - | NoAR | 95.0 | 去掉自回归 rollout,等价于 $N=1$ 单步映射 |
| PhysGen-STP | NOVA | continuous | - | AR | 96.8 | 单 token prediction,去掉 Lookahead-MTP |
| PhysGen-Full | NOVA | continuous | + | AR | 99.6 | 完整模型 |
消融对应四个结论:视频预训练带来 +13.2;连续 token 相对 discrete 带来 +5.4;AR 架构带来 +4.6;L-MTP 带来 +3.4。
6.5 质性分析
7. 讨论与局限
7.1 这篇论文最有价值的地方
最有价值的是它把“视频生成模型中有物理知识”这句话落成了一个可训练的机器人策略结构。它没有停在“生成视频再从视频中提动作”的间接路线,而是把动作直接并入自回归视频 token 流,让模型同时预测未来视觉和动作。这使得视频 prior、动作控制和序列规划在同一个模型内部交互。
第二个价值是连续 token。机器人动作和视觉 latent 的连续性非常重要,离散 token 在语言里自然,在控制里却容易产生精度损失。PhysGen 用扩散 de-tokenizer 学连续条件分布,在保持生成建模能力的同时避免硬量化。
7.2 结果为什么站得住
- 消融闭环比较完整:视频预训练、连续 token、自回归、L-MTP 分别有对应 ablation,且每项都有正收益。
- 与强基线比较:LIBERO 上对比 OpenVLA、Pi0-Fast、WorldVLA、MolmoACT;真实实验对比 Pi0,说明不是只打弱 baseline。
- 真实透明物体任务有辨识度:Pick Transparency 涉及反射/折射导致的视觉歧义,正好能测试视频物理先验是否帮助控制。
7.3 需要谨慎的地方
“视频模型=物理模拟器”仍是隐喻:视频生成模型学到的是视觉统计中的物理规律,不一定等价于可控、可验证的 dynamics model。它可能预测视觉合理但控制上错误的状态。
真实实验规模较小:四个 Franka tabletop 任务、每任务 20 trials,可以证明可行性,但不足以说明广泛 real-world generalization。
ManiSkill 并非全面领先:平均 74 低于 RDT 的 84,StackCube 也低于 DP/RDT。这说明没有动作预训练的视频先验不是所有场景的银弹。
源码未包含实际附录:正文提到真实任务细节见 Appendix,但 LaTeX 中 appendix input 被注释掉。因此部分任务定义细节无法从源码进一步核查。
8. 组会追问
Q1: PhysGen 和 WorldVLA/UWM 最大区别是什么?
它们都关注 video-action joint prediction,但 PhysGen 明确采用 NOVA 式连续非量化自回归 backbone,把 frame token 和 action token 拼成 physical token,逐步预测世界和机器人共同演化;同时用 diffusion de-tokenizer 对连续视觉/动作分布建模。
Q2: 为什么 action token 可以 attend 到 future visual states 不算泄漏?
作者的意思是在同一个 physical chunk 内,动作规划可以读取对应视觉 token 表征,从而形成视觉条件化的逆运动学关系;跨 chunk 仍保持 temporal causal mask。这里要注意“future visual states”更像 chunk 内联合 token 的结构化条件,而不是无限制读取真实未来轨迹。
Q3: L-MTP 推理时为什么只执行第一个 token?
后续 token 用作 lookahead 信息,帮助当前预测具备更长规划视野;只执行第一个 token 可以保留 receding-horizon control 的反馈能力,下一步根据真实环境反馈重新预测。
Q4: 连续 diffusion de-tokenizer 比 MLP regression 好在哪里?
MLP regression 给出确定性点估计,容易平均化多模态动作。diffusion de-tokenizer 学的是条件分布 $p(P_n|Z_n)$,既保留连续精度,又保留生成模型表达多模态输出的能力。
Q5: 如果复现,最容易踩坑的是哪里?
一是 token 组织和 mask:language、5 个 physical package、每包 360 visual + 8 action token 必须对齐;二是 action de-tokenizer 的扩散采样和训练时对 $t$ 的多次采样;三是多视角拼接后与原始 NOVA VAE 的输入分布是否匹配。
9. 复现信息
9.1 链接与代码状态
- arXiv: https://arxiv.org/abs/2603.00110
- Hugging Face paper page: https://huggingface.co/papers/2603.00110
- 源码 LaTeX 中未提供 PhysGen 官方代码仓库链接;Web 检索也未发现明确对应 `2603.00110` 的官方 GitHub。
9.2 最小复现配置速记
Backbone: NOVA autoregressive video generation model
Language tokens: frozen Phi language model
Visual tokenizer: frozen 3D-VAE from NOVA
Action tokenizer: MLP, K_A = L = 8
Physical token: concat(frame tokens, action tokens)
Context length: 2096 = 256 language + 5 * (360 visual + 8 action)
De-tokenizer: frame diffusion + Action-DiT action diffusion
Training: teacher forcing, LoRA finetuning, 4 samples of t per image/action
Inference: autoregressive rollout with KV-cache
Hardware: single A100-SXM4-80GB, longest finetuning within 60 GPU hours9.3 覆盖检查
本报告已覆盖 Abstract、Introduction、Related Work、Preliminaries、Method、Experiment、Conclusion 的核心内容。源码包含 `\appendix` 但附录文件输入被注释,未发现实际附录正文可整合;报告已在相应位置说明这一点。
生成日期:2026-05-08。源码包、PDF 与解压目录保留未清理,便于后续核查。