S-VAM: Shortcut Video-Action Model by Self-Distilling Geometric and Semantic Foresight
1. 论文速览
难度评级:★★★★☆。需要理解 VLA/VAM、Stable Video Diffusion、扩散模型去噪特征、Vision Foundation Model 表征、token condensation/QFormer/Perceiver,以及 diffusion policy。
关键词:Video-Action Model, Self-Distillation, Geometric Foresight, Semantic Foresight, Vision Foundation Models, Diffusion Policy。
| 阅读定位问题 | 答案 |
|---|---|
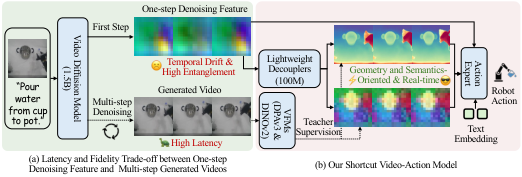
| 论文要解决什么 | 现有 VAM 要么依赖慢速 multi-step video generation,要么使用 noisy one-step diffusion features,难以同时满足实时控制和高质量未来预见。 |
| 作者的方法抓手 | 用 diffusion model 自己多步生成的视频抽取 VFM teacher targets,再训练 lightweight geometric/semantic decouplers 从单步 denoising features 直接预测这些 teacher representations。 |
| 最重要的结果 | CALVIN 平均序列长度 4.16,MetaWorld 平均成功率 72.8%;真实双臂 Cobot 四任务上优于 VPP,且 action chunk 为 8 时有效控制频率 25 Hz。 |
| 阅读时要注意的点 | 核心不是简单把 VFM 特征拼到策略里,而是 teacher target 来自同一 diffusion trajectory 的 multi-step generated videos,避免 GT future frames 与 one-step features 的轨迹错配。 |
核心贡献清单
- 提出 S-VAM shortcut。绕过 iterative video generation 的推理延迟,用单次 denoising forward pass 获得可用于控制的未来表征。
- 提出 geometric/semantic foresight self-distillation。用 DPAv3 和 DINOv2 从 SVD 多步生成视频中抽取 teacher representations,监督 decouplers 学会从 noisy one-step features 中恢复结构化 foresight。
- 提出 Uni-Perceiver action expert 条件聚合。把几何、语义和原始扩散特征压缩成 compact tokens,作为 diffusion policy 的条件。
- 在仿真和真实机器人验证。覆盖 CALVIN、MetaWorld 和 AgileX Cobot 真实双臂任务,并提供组件消融和 VFM teacher target 消融。
2. 动机
2.1 要解决什么问题
VLA 模型通常把预训练 VLM 接上 action head,再用机器人动作数据微调。问题是,VLM 主要来自静态图文预训练,本身不具备物理交互所需的 spatiotemporal foresight;如果完全依赖机器人动作数据学习动态规律,数据成本很高。
VAM 路线试图用 video diffusion model 产生 visual plan,再让 action expert 根据视觉计划预测控制。这样可以利用互联网视频中的动态先验,减少对机器人动作数据的依赖。
2.2 已有方法的局限
- Multi-step video generation:多步去噪能产生较高保真视觉未来,但推理延迟高,不适合实时控制。
- One-step feature extraction:单步扩散特征速度快,但特征 noisy 且 entangled,难以稳定表达几何结构、对象语义和未来交互。
- 直接动作学习:不显式引入视频模型动态先验,需要从有限机器人数据中学习物理动态。
- 用 GT future frames 做蒸馏:论文消融指出,GT future frames 与 one-step diffusion features 不在同一生成轨迹上,会造成 trajectory misalignment,性能从 4.16 降到 3.82。
2.3 本文的解决思路
本文把“慢速多步生成视频中的稳定结构化表征”当作 teacher,把“快速单步 denoising features”当作 student 输入。几何分支学习 DPAv3 表征,语义分支学习 DINOv2 表征。推理时不再跑完整多步视频生成,只需要一次 denoising feature extraction 加 decouplers,就能得到可供动作专家使用的 geometric and semantic foresight。
4. 方法详解
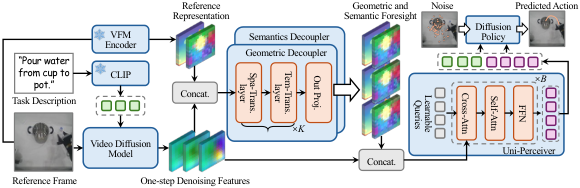
4.1 方法概览
S-VAM 的 pipeline 是:输入当前观察 $I$ 和任务描述 $P$;SVD 在第一步 denoising 时抽取多层 up-sampling features;geometric decoupler 和 semantic decoupler 分别把这些 noisy/entangled features 解耦为 DPAv3-like 和 DINOv2-like future representations;Uni-Perceiver 把两类 foresight 与原始 diffusion feature 聚合为 compact tokens;diffusion policy 根据这些 tokens 和文本 embedding 输出动作序列。
4.2 方法演变脉络
| 阶段 | 形式 | 改进动机 |
|---|---|---|
| Direct VLA | 当前图像/语言直接到动作。 | 缺少显式 spatiotemporal foresight,机器人数据需求高。 |
| VAM with multi-step video generation | 视频扩散模型多步生成未来视觉计划,再预测动作。 | foresight 高保真,但 multi-step denoising 推理慢。 |
| One-step VAM | 用单步扩散内部特征指导动作。 | 实时性好,但特征 noisy/entangled。 |
| S-VAM | 把多步生成视频的 VFM representations 自蒸馏到单步特征。 | 保留单步效率,同时获得更稳定的几何/语义未来表征。 |
4.3 核心设计与数学推导
4.3.1 Stable Video Diffusion 基础
$z_s$ 是第 $s$ 步 latent,$\epsilon_\theta$ 是噪声预测网络,条件为观察帧 $I$ 和任务描述 $P$。S-VAM 不在控制时完整执行多步采样,而是使用第一步 denoising features。
4.3.2 VFM teacher target
$\hat{V}$ 是 SVD multi-step generated video;$\Phi$ 是 frozen VFM encoder;插值用于对齐空间分辨率。论文使用 DPAv3 作为 geometric teacher、DINOv2 作为 semantic teacher。
4.3.3 One-step denoising feature 聚合
$F_l$ 是第 $l$ 个 up-sampling layer 的 feature map,$C_\Sigma=\sum_l C_l$。这些特征快,但本身 noisy 和 entangled。
4.3.4 Geometric/Semantic decouplers
$\mathcal{S}$ 和 $\mathcal{T}$ 分别是 spatial 和 temporal transformer layers。每个分支最后投影回对应 VFM 维度。
论文强调,teacher 来自同一 diffusion trajectory 的 generated videos,避免用 GT future frames 造成 trajectory misalignment。
4.3.5 Uni-Perceiver 与 diffusion policy
$\mathcal{Q}$ 是 $N$ 个 learnable latent queries。Cross-attention 从高维 spatiotemporal context 中抽取信息,self-attention 建模 compact tokens 内部关系。
$a_j$ 是 diffusion timestep $j$ 的 noisy action,$E$ 是任务文本 embedding,$\epsilon_\phi$ 是动作噪声预测网络。
4.4 实现要点
5. 实验
5.1 实验设置
| 项目 | 设置 |
|---|---|
| CALVIN | ABC→D:在 ABC 环境训练,在 unseen D 环境评估,考察连续 long-horizon tasks 泛化。指标为第 $i$ 个任务成功率和 Avg. Len. |
| MetaWorld | 50 个 Sawyer manipulation tasks,按 Easy/Middle/Hard 统计。训练集每任务 50 demonstrations。 |
| 真实机器人 | AgileX Robotics Cobot 双臂平台,Mobile ALOHA design;每臂 7 DoF 和 parallel gripper;仅使用 front camera monocular RGB observations。 |
| 真实任务 | Place-to-Pot、Place-to-Pot (Hard, transparent object)、Pour-Water、Lift-Pot。统一 multi-task model,每任务约 50 human demonstrations,评估每任务 25 trials。 |
| Baselines | Direct action learning:RT-1、Diffusion Policy、OpenVLA、CLOVER、$\pi_0$、Spatial Forcing;Predictive methods:SuSIE、VPP、GR-1、Uni-VLA、HiF-VLA 等。 |
| 代码仓库 | 项目页提供官方代码:https://github.com/Haodong-Yan/S-VAM-Code。 |
5.2 主要结果
CALVIN
| Method | 1st | 2nd | 3rd | 4th | 5th | Avg. Len. |
|---|---|---|---|---|---|---|
| Spatial Forcing | 93.6 | 85.8 | 78.4 | 72.0 | 64.6 | 3.94 |
| VPP | 90.9 | 81.5 | 71.3 | 62.0 | 51.8 | 3.58 |
| Uni-VLA | 95.5 | 85.8 | 74.8 | 66.9 | 56.5 | 3.80 |
| HiF-VLA | 93.5 | 87.4 | 81.4 | 75.9 | 69.4 | 4.08 |
| S-VAM | 95.8 | 90.7 | 83.7 | 77.0 | 68.9 | 4.16 |
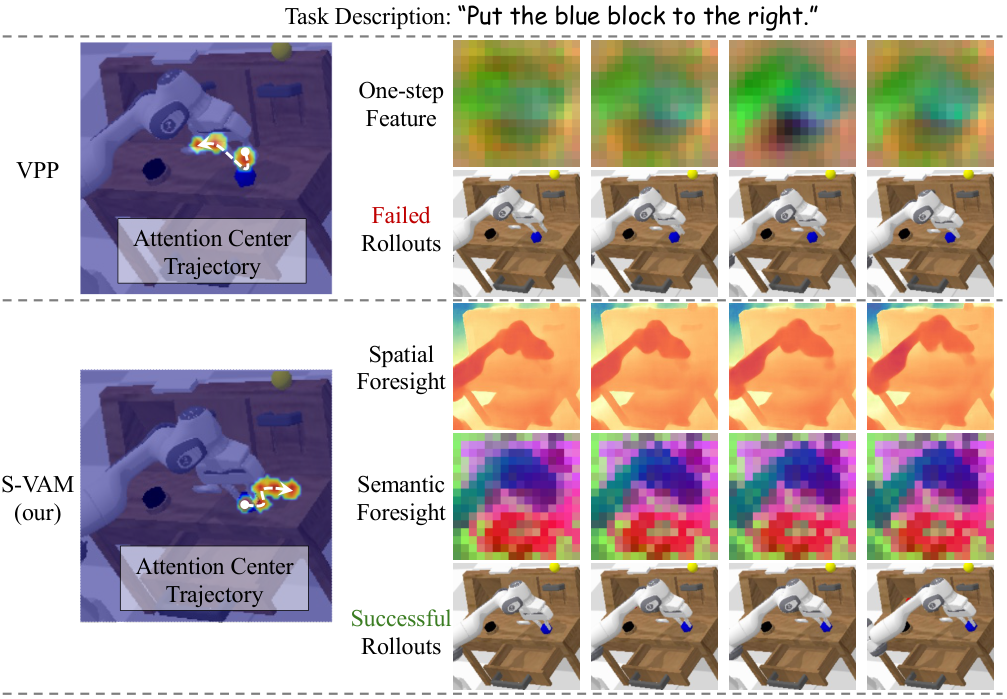
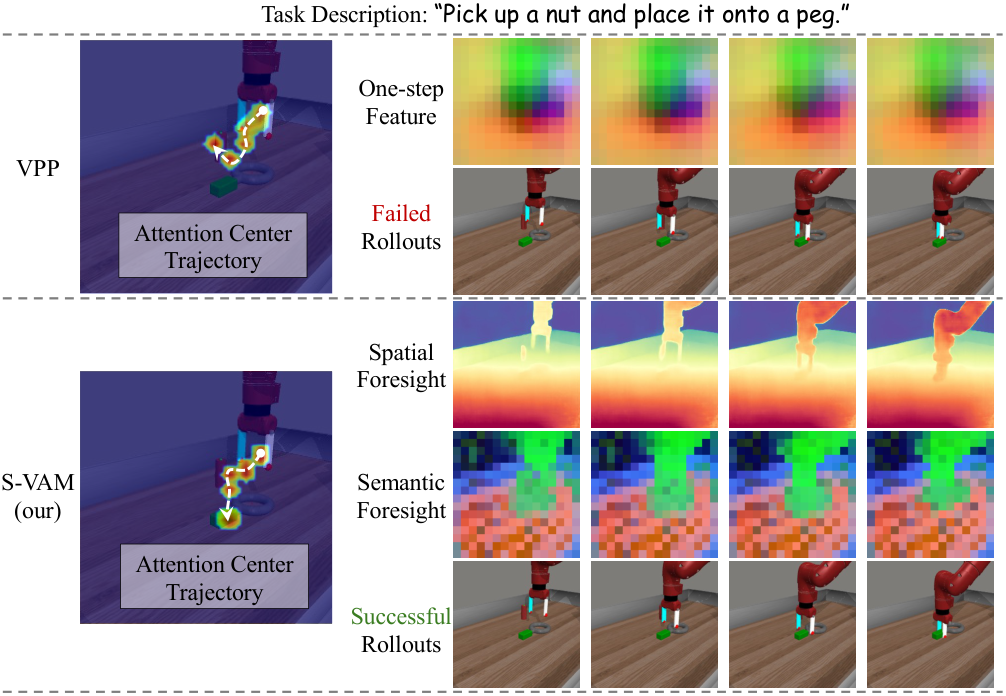
论文强调 S-VAM 比直接 baseline VPP 高 0.58 Avg. Len.。定性图中,VPP 的 one-step entangled features 产生偏离指令的 attention trajectory;S-VAM 的 decoupled foresight 使 attention trajectory 与语言指令更一致。
MetaWorld
| Method | Easy | Middle | Hard | Average |
|---|---|---|---|---|
| Spatial Forcing | 0.737 | 0.436 | 0.451 | 0.609 |
| HiF-VLA | 0.729 | 0.364 | 0.404 | 0.577 |
| VPP | 0.818 | 0.493 | 0.526 | 0.682 |
| S-VAM | 0.793 | 0.607 | 0.684 | 0.728 |
S-VAM 平均成功率 72.8%,Hard tasks 为 68.4%,论文称其在 hard tasks 上显著超过 VPP 的 52.6%。作者把优势归因于 decoupled geometric/semantic foresight 能在复杂物体交互和精细几何约束中提供更稳定的目标定位。
真实机器人
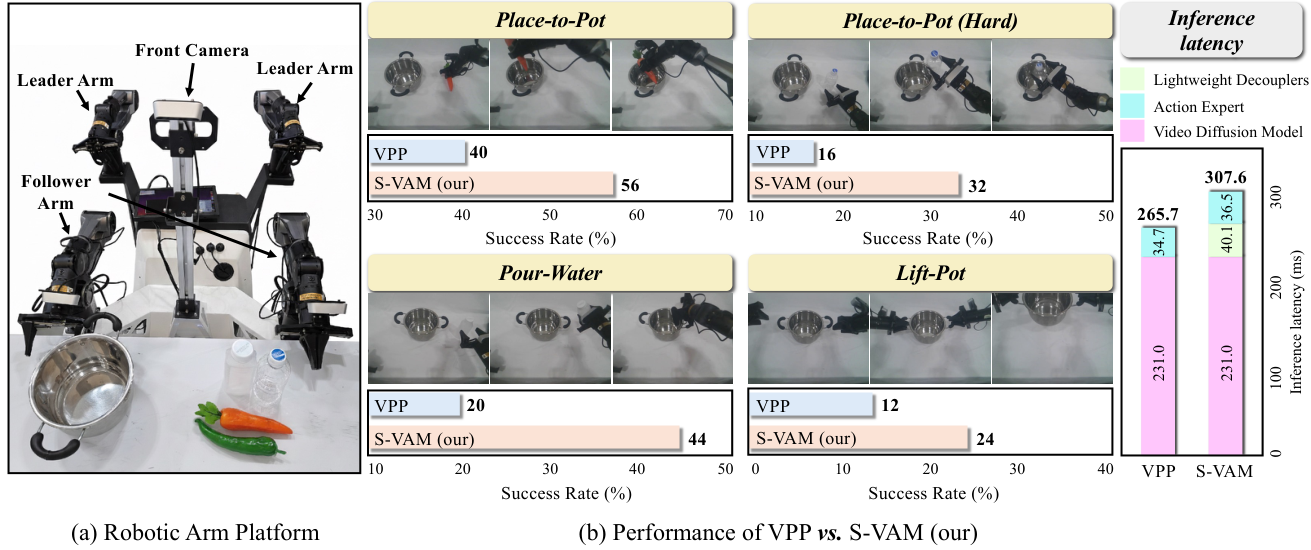
真实实验的关键细节:每任务约 50 demonstrations,25 trials。Place-to-Pot (Hard) 涉及透明物体,VPP 成功率 16%,S-VAM 提升到 32%。论文解释为 geometric decoupler 有助于透明表面的深度歧义,semantic decoupler 有助于保持透明物体的一致表征。
5.3 消融实验
| Variant | 1st | 2nd | 3rd | 4th | 5th | Avg. Len. | 目的 |
|---|---|---|---|---|---|---|---|
| w/o Geometric Distillation | 94.1 | 87.1 | 79.3 | 73.5 | 66.5 | 4.01 | 验证几何 foresight 作用。 |
| w/o Semantic Distillation | 94.0 | 87.1 | 80.4 | 73.2 | 64.1 | 3.99 | 验证语义 foresight 对对象身份一致性的作用。 |
| w/o Self-Distillation | 94.2 | 85.2 | 75.9 | 67.8 | 59.0 | 3.82 | 用 GT future frames 替代模型自生成视频 teacher。 |
| w/o Uni-Perceiver | 94.0 | 84.6 | 74.7 | 65.1 | 53.8 | 3.72 | 验证 compact token condensation 的必要性。 |
| w/o Original Diffusion Feature | 95.3 | 86.6 | 77.6 | 70.9 | 62.5 | 3.93 | 验证原始扩散特征提供 residual global context。 |
| S-VAM Full | 95.8 | 90.7 | 83.7 | 77.0 | 68.9 | 4.16 | 完整模型。 |
5.4 补充实验:VFM teacher target 选择
| Type | Representation | Avg. Len. | 论文解释 |
|---|---|---|---|
| Semantic | CLIP / SigLIP | 3.72 / 3.77 | global semantics 有场景级信息,但对低层控制的 dense patch-level affordance 不足。 |
| Semantic | DINOv2 / DINOv3 | 4.01 / 3.95 | dense patch-level 表征优于 CLIP/SigLIP。 |
| Geometric | DPAv3 / VGGT | 3.99 / 3.74 | DPAv3 适应 dynamic video streams;VGGT 偏 static scene reconstruction。 |
| Motion-aware | VideoMAEv2 / V-JEPA2 | 3.90 / 3.74 | 作者认为当前视频模型在 fine-grained feature fidelity 上仍弱于专门图像模型。 |
| Synergistic | SigLIP+DPAv3 / DINOv2+VGGT / DINOv2+DPAv3 | 4.06 / 4.04 / 4.16 | DINOv2 的 dense semantics 与 DPAv3 的 dynamic geometry 互补。 |
6. 分析与讨论
6.1 论文已给出的结果分析与解释
- CALVIN 中,作者把 S-VAM 相对 VPP 的优势归因于 decoupled geometric and semantic foresight 能形成更连贯、与语言指令一致的 attention trajectory。
- MetaWorld hard tasks 中,作者认为复杂物体交互和精细几何约束更需要动态几何与 dense semantic foresight。
- 真实透明物体任务中,作者明确解释:geometric decoupler 缓解透明表面的 depth ambiguity,semantic decoupler 维持透明物体的一致对象表征。
- VFM target 消融中,作者解释 DINOv2 优于 CLIP/SigLIP 是因为 dense patch-level 表征更适合低层控制;DPAv3 优于 VGGT 是因为 DPAv3 面向动态视频流。
6.2 作者自述的局限性
源码中的 Conclusion 没有显式列出 limitation 或 failure cases,也未提供独立 appendix。因此本报告不额外加入报告撰写者的主观局限。可复现性层面的缺口仅在 §6.4 中按论文已公开信息列出。
6.3 论文中明确写出的适用边界与讨论
- S-VAM 的 teacher target 依赖 SVD 自己的 multi-step generated videos;如果视频生成 backbone 对某类场景不能产生稳定未来,self-distilled teacher 也会受影响。该点是从方法机制推出的适用前提,不是作者单独列出的实验局限。
- 真实实验只使用 front-camera monocular RGB observations,并在 4 个双臂任务上验证。
- 实时控制结论基于 action chunk 长度 8、RTX 3090 推理、307.6 ms forward pass 的设置。
6.4 可复现性审计
| 项目 | 状态 | 说明 |
|---|---|---|
| 源码结构 | 已获取 | arXiv e-print 包含 main.tex、secs/、bib、style 和 PDF figures。 |
| 图表 | 已提取 | 所有 PDF 图已转换为 PNG 并放入 figures/。 |
| 代码仓库 | 已找到 | 项目页链接到 Haodong-Yan/S-VAM-Code。 |
| 训练配置 | 部分完整 | 论文给出三阶段训练步数和 GPU 配置,但未在 LaTeX 中列出 batch size、learning rate 等完整超参数表。 |
| 数据设置 | 主要信息明确 | CALVIN、MetaWorld、真实 Cobot demos/trials 均有说明。 |
| 附录 | 无独立附录 | 源码中未发现 appendix,因此没有额外证明、失败案例或完整超参数附录可整合。 |